1. Introduction and use of lidar
1. Introduction and use of lidar1.1, Program Function Description1.2, Program code reference path1.3, Program startup1.4, Introduction to MS200 lidar1.4.1, Overview1.4.2, Distance measurement principle1.4.3 Baud rate1.4.4 Specifications
Before driving the laser lidar, you need to identify the olidar lidar device on the car side. The environment has been set up in the system image. After connecting to the car through SSH or VNC, enter in the terminal:
xxxxxxxxxxll /dev/olidar

The result shows lidar and its corresponding port, indicating that the lidar device is connected successfully. If no result is displayed, you can try to re-plug the lidar USB.
1.1, Program Function Description
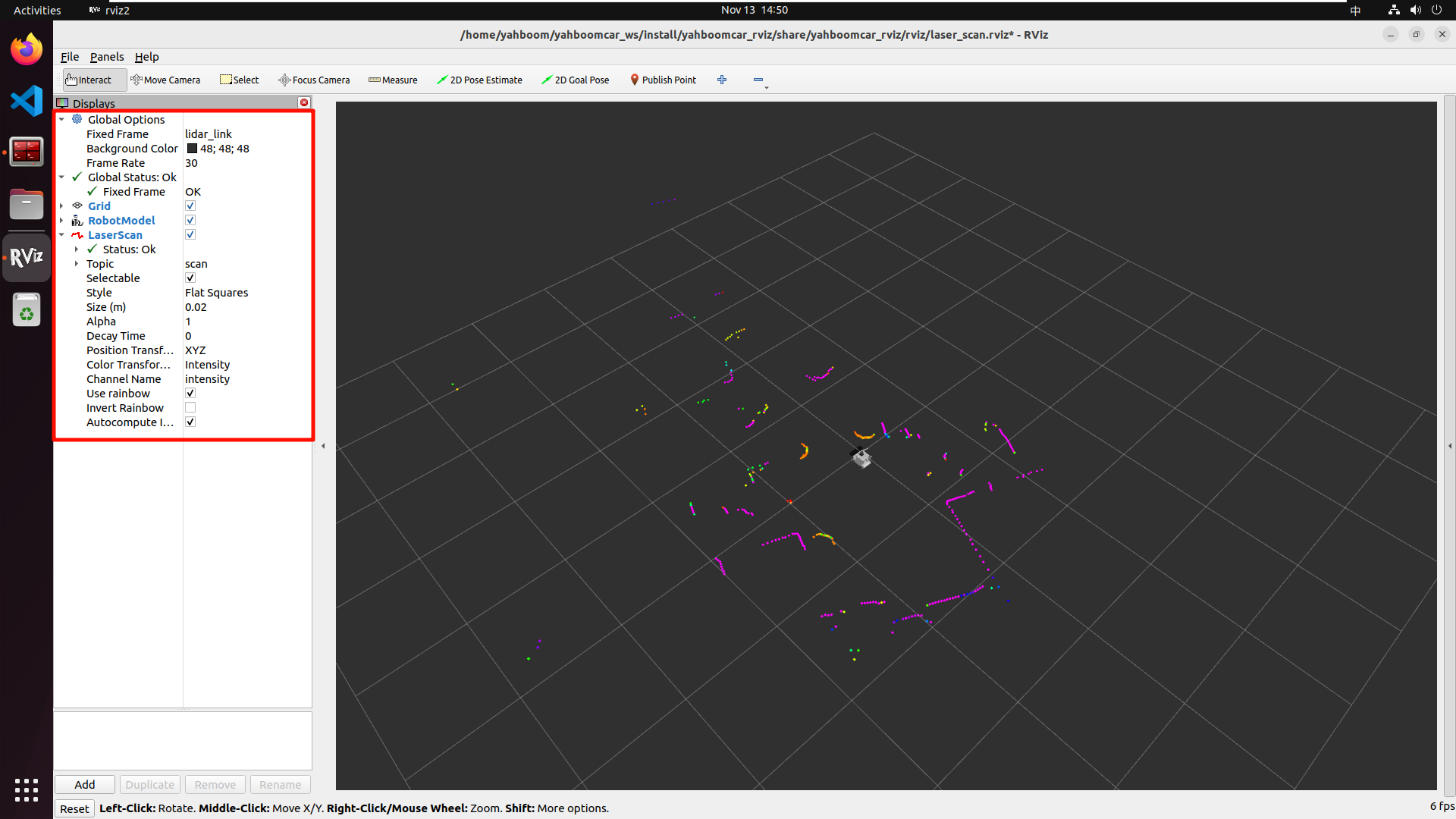
After the program runs, start the olidar MS200 laser lidar, turn on the lidar scanning data, and visualize the laser lidar scanning data in rviz on the virtual machine side.
1.2, Program code reference path
After SSH connects to the car, the function source code for starting the lidar is located at,
xxxxxxxxxx/home/sunrise/software/library_ws/src/olidar_lidar/launch/ms200_scan.launch1.3, Program startup
After SSH connects to the car, run in the terminal,
xxxxxxxxxxros2 launch olidar_lidar ms200_scan.launch.pyOpen the virtual machine terminal and run,
xxxxxxxxxxros2 launch yahboomcar_rviz yahboomcar_laser_launch.py
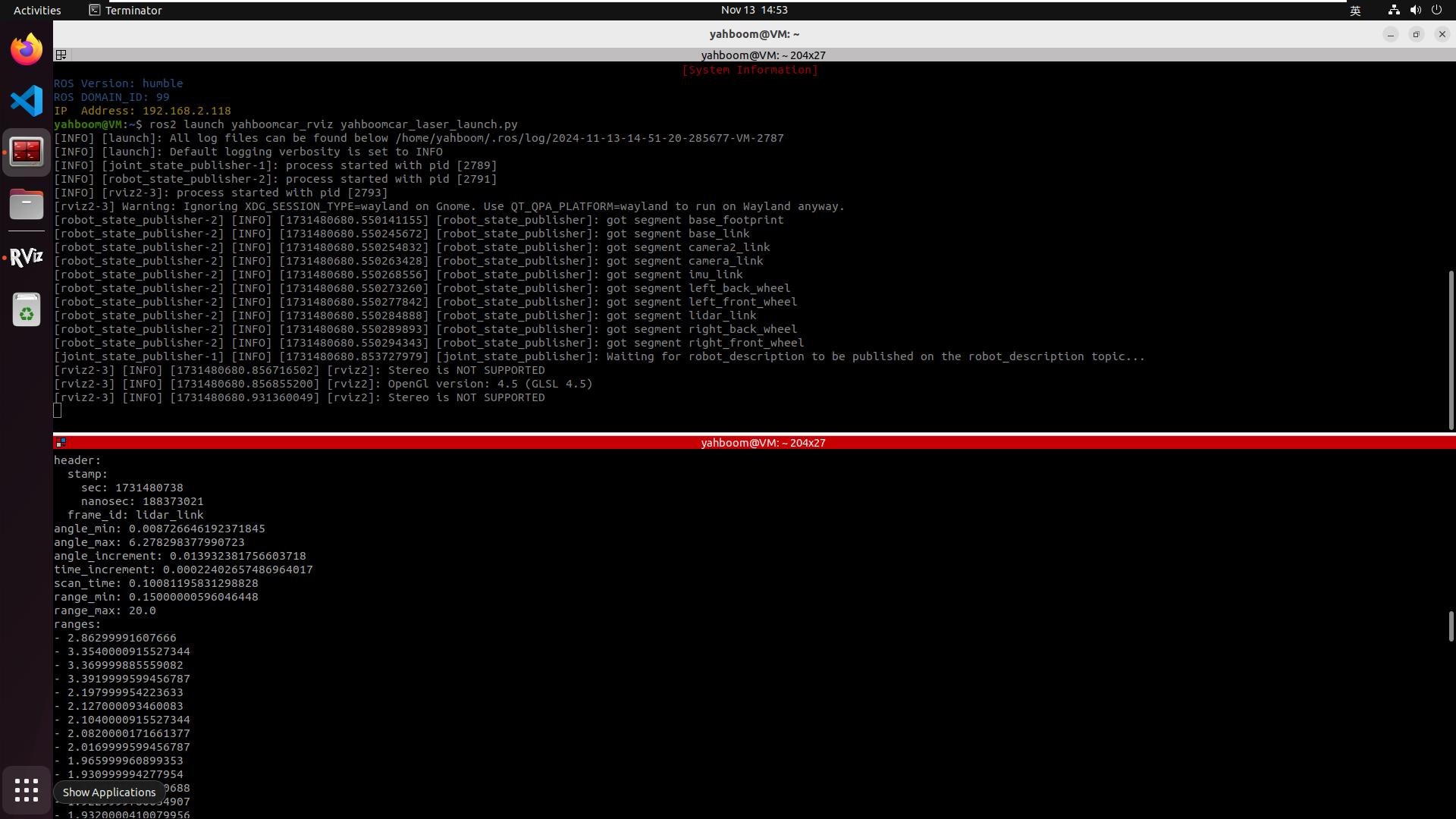
You can use the following command to print the data scanned by the lidar,
xxxxxxxxxxros2 topic echo /scan
1.4, Introduction to MS200 lidar
1.4.1, Overview
Single-line laser lidar refers to a lidar whose laser source emits a single-line beam. It is divided into triangulation and TOF laser lidar, and is mainly used in the field of robots. It has fast scanning speed, high resolution and high reliability. Compared with multi-line laser lidar, single-line laser lidar has faster response in angular frequency and sensitivity, so it is more accurate in the distance and accuracy of obstacle measurement.
1.4.2, Distance measurement principle
The measurement principle of Oruida MS200 is TOF ranging method.
TOF laser lidar is based on measuring the flight time of light to obtain the distance of the target object. Its working principle is mainly manifested as a beam of modulated laser signal emitted by a laser transmitter, which is received by a laser detector after being reflected by the object to be measured. The distance of the target can be calculated by measuring the phase difference between the emitted laser and the received laser.
1.4.3 Baud rate
The baud rate used by the MS200 lidar is 230400.
1.4.4 Specifications
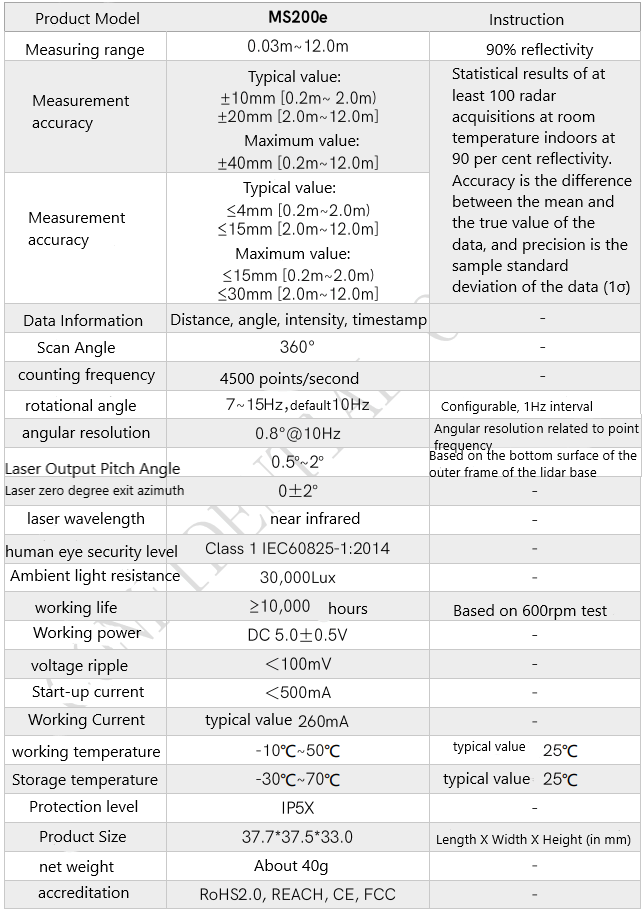
Among them, the parameters such as ranging range, measurement accuracy, rotation speed, and angular resolution are all important indicators of lidar working performance.