SBUS receiver usage process
Hardware preparation
HT-10A remote controller
SBUS receiver
ROS control board
HT-10A remote controller
You need to install 4 AA batteries in advance to power the HT-10A remote controller:

| HT-10A remote controller | Default channel: The remote controller does not perform channel mapping |
|---|---|
| CH1 | Right joystick: slide left and right |
| CH2 | Right joystick: slide up and down |
| CH3 | Left joystick: slide up and down |
| CH4 | Left joystick: slide left and right |
| CH5 | SWA channel |
| CH6 | SWB channel |
| CH7 | SWC channel |
| CH8 | SWD channel |
| CH9 | VRA channel |
| CH10 | VRB channel |
SBUS receiver
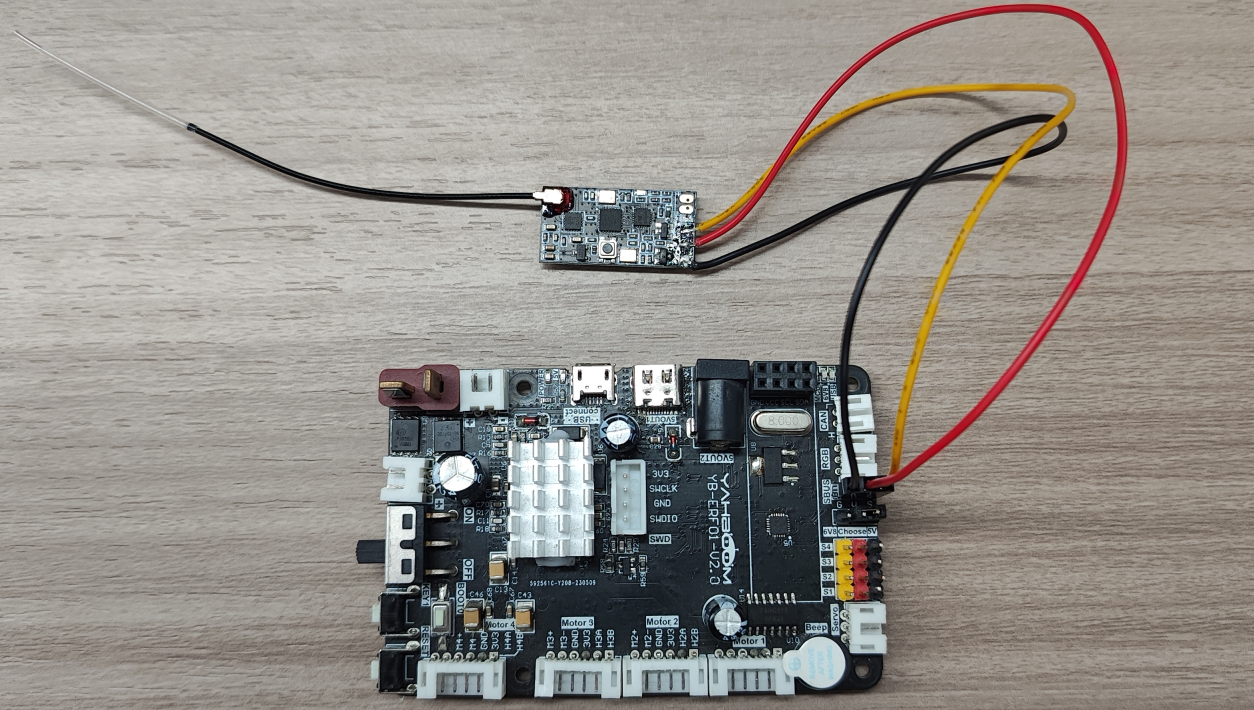
The picture shows the hardware connection between the SBUS receiver and the ROS control board:
| SBUS receiver | ROS control board |
|---|---|
| S | S |
| + | V |
| - | G |
Pairing steps
Use a 12V T-type battery pack or a MicroUSB data cable to power the ROS control board, and the ROS control board powers the SBUS receiver through the SBUS interface.
| SBUS receiver indicator light status | Meaning |
|---|---|
| LED flashes slowly | Device not connected |
| LED flashes quickly | Pairing status |
| LED is always on | Device connected |
Power the SBUS receiver, and the LED indicator on the SBUS flashes slowly;
Press and hold the button on the SBUS receiver for 1 second, and the LED flashes quickly, indicating that the SBUS receiver enters the pairing state;
Turn on the power switch of the HT-10A remote control, and the HT-10A remote control automatically pairs with the SBUS receiver;
After pairing is successful, the LED indicator on the SBUS receiver is always on: the connected state cannot enter the pairing state.
Note: The HT-10A remote control and the SBUS receiver only need to be paired once, and they will automatically connect the next time they are turned on, without the need to pair again!