8.ROS2 topic communication subscriber
1. Introduction to topic communication
Topic communication is the most frequently used communication method in ROS2. A publisher publishes data on a specified topic, and subscribers can receive the data as long as they subscribe to the data on the topic.
Topic communication is based on the publish/subscribe model, as shown in the figure:

The characteristics of topic data transmission are from one node to another node. The object sending data is called Publisher, and the object receiving data is called Subscriber. Each topic needs to have a name, the transmitted data also needs to have a fixed data type.
Next, we will explain how to use Python language to implement topic communication between nodes.
This case is located in the factory docker container. The source code location is:
/root/yahboomcar_ros2_ws/yahboomcar_ws/src/pkg_topic
2. Subscriber realization
Create a new file [subscriber_demo.py] in the same directory as [publisher_demo.py]
Next edit [subscriber_demo.py] to implement the subscriber function and add the following code:
x#Import related librariesimport rclpyfrom rclpy.node import Nodefrom std_msgs.msg import String
class Topic_Sub(Node): def __init__(self,name): super().__init__(name) #To create a subscriber, create_subscription is used. The parameters passed in are: topic data type, topic name, callback function name, and queue length. self.sub = self.create_subscription(String,"/topic_demo",self.sub_callback,1) #Callback function execution program: print the received information def sub_callback(self,msg): print(msg.data)def main(): rclpy.init() #ROS2 Python interface initialization sub_demo = Topic_Sub("subscriber_node") # Create the object and initialize it rclpy.spin(sub_demo) sub_demo.destroy_node() #Destroy node object rclpy.shutdown() #Close the ROS2 Python interface
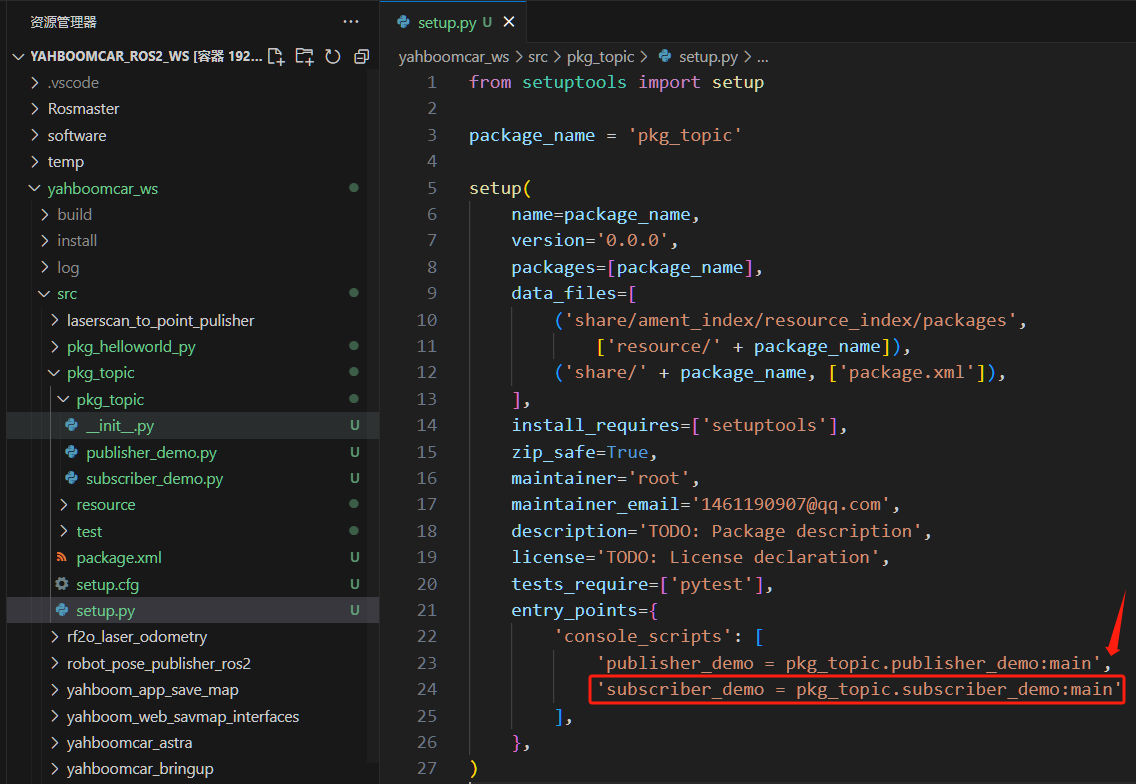
3. Edit configuration file
4. Compile workspace
xxxxxxxxxxcd ~/yahboomcar_ros2_ws/yahboomcar_wscolcon build --packages-select pkg_topicsource install/setup.bash
5. Run program
The sub-terminal execution is as follows:
xxxxxxxxxx#Start publisher noderos2 run pkg_topic publisher_demo#Start Subscriber Noderos2 run pkg_topic subscriber_demo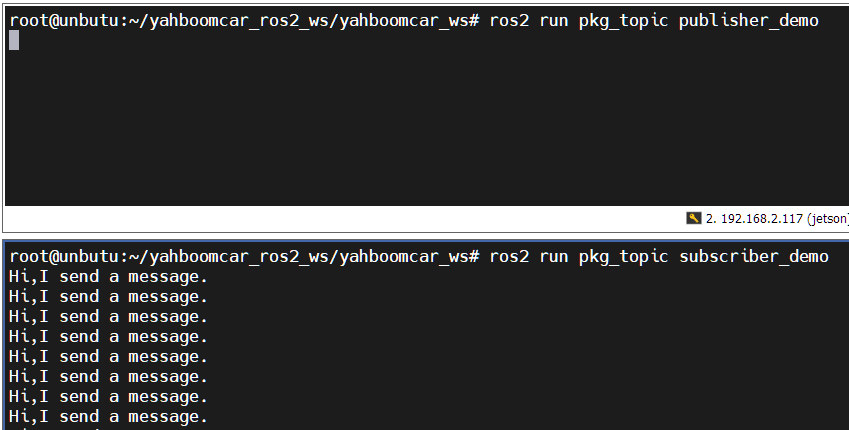
As shown in the figure above, the terminal running the subscriber will print the /topic_demo information published by the publisher.