Introduction to the voice control module
1. Introduction to the voice control module
1.1. CSK4002 chip
The voice control module on NAVROBOT is developed based on the CSK4002 chip. CSK4002 is a high-performance, powerful, low-power, and resource-rich AISoC developed and designed for the AloT field. It can be widely used in smart homes, smart home appliances, and emerging consumer electronics industries.
- CSK4002 uses the Andes D1088 core. Its AI/DSP acceleration module MVA supports a variety of Neural Network operators and vector operations, deeply adapts to iFlytek AI algorithms, and has a maximum computing power of 128GOPS.
- Comes with 8M Flash, 8M PSRAM, and 1M SRAM.
- Supports 8-channel PDM audio input and 16-channel I2S Audio Input data processing.
- Integrates a rich set of mainstream peripheral interfaces: GPIO/UART/I2C/SPI/QSPI/SDIO/USB1.1/SDIO, etc.
- Equipped with low-latency embedded operating system Free RTOS, complete BSP driver, and complete development tool resources.
1.2. Module Features
- Far-field sound pickup: The front end uses iFlytek's dual-microphone array algorithm, which can achieve 360-degree far-field 5m user sound pickup. Equipped with automatic voice gain, it can be adaptively adjusted according to the user's volume to ensure the overall audio listening experience is consistent after noise reduction.
- Echo cancellation: When the device is broadcasting content or music during user interaction, the user can wake up the interrupt broadcast process for the next round of interaction, making the interactive experience more natural.
- Voice broadcast: Voice broadcast refers to the user waking up the device and saying the command word, and the device responds with the corresponding reply broadcast response; or it is an active prompt. The purpose of voice broadcast is to give feedback to the user through broadcast reply when the user issues a voice command or in an appropriate scenario.
- Offline command: When the device is awake, the user speaks a command word (instruction) within the specified range. After receiving the information, the voice module performs relevant processing according to the content of the command word, or transmits the content information to the host computer for relevant processing.
- Peripheral communication: The module receives the input of the microphone for processing, and then communicates with other devices through USB, I2S, SDIO and other interfaces, and also communicates with other devices through general programmable IO.
- Environmental noise reduction: It is widely used in environmental noise reduction in scenes such as home, car, office, etc., while retaining human voice information to the greatest extent.
2. Wiring diagram
The module is connected to the ROSMASTER main control (or HUB board) through a universal Type-c data cable, and the speaker is connected to the module through a PH2.0 data cable.
- As shown in the figure below, one end of the Micro-USB data cable is connected to the Program port of the module, and the other end is connected to the port of the NAVROBOT motherboard (After this is plugged in, it cannot be modified after the port is bound later, refer to the next section for details).
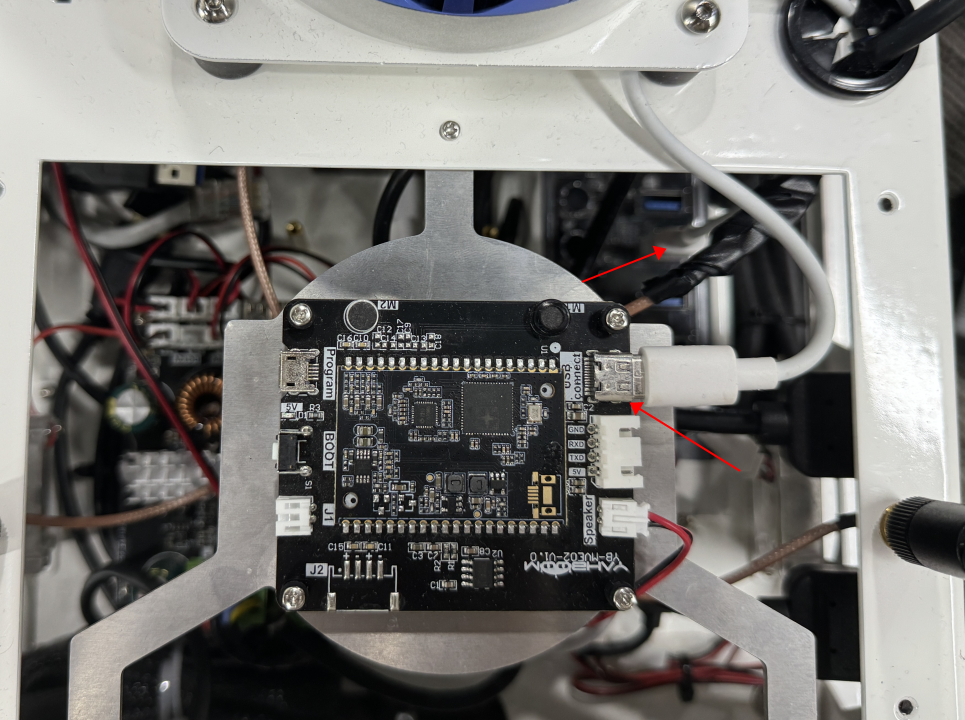
- As shown in the figure below, the PH2.0 data line port is connected to the Speaker port on the module.

3. Wake-up word
The wake-up word is " Hi Yahboom". When waking up, you need to speak slower. If you speak too fast, the module will not recognize it. After waking up the module, other command words can be recognized later. Within 20 seconds of waking up, there is no need to wake up again. Just say the command word directly.
3.1, Command words
- Voice control of car movement
| Voice recognition content | Voice module sends to host | Host sends to voice module | Voice broadcast content |
|---|---|---|---|
| Go ahead | $B004# | $A004# | OK , let's go. |
| Back | $B005# | $A005# | OK , I‘m back. |
| Turn left | $B006# | $A006# | OK , I‘m turning left. |
| Turn right | $B007# | $A007# | OK , I‘m turning right. |
- Voice control of color recognition
| Voice recognition content | Voice module sends to host | Host sends to voice module | Voice broadcast content |
|---|---|---|---|
| What color is this | $B060# | $A061# | This is red |
| What color is this | $B060# | $A062# | This is blue |
| What color is this | $B060# | $A063# | This is green |
| What color is this | $B060# | $A064# | This is yellow |
- Voice control color tracking
| Voice recognition content | Voice module sends to host | Host sends to voice module | Voice broadcast content |
|---|---|---|---|
| yellow following | $B072# | $A072# | OK, I found the yellow |
| red following | $B073# | $A073# | OK, I found the red |
| green following | $B074# | $A074# | OK, I found the green |
| follow this color | $B075# | $A075# | OK, I found this color |
- Voice-controlled automatic driving (line patrol)
| Voice recognition content | Voice module sends to host | Host sends to voice module | Voice broadcast content |
|---|---|---|---|
| Tracking the red line | $B023# | $A023# | OK, I will track the red line |
| Tracking the green line | $B024# | $A024# | OK, I will track the green line |
| Tracking the blue line | $B025# | $A025# | OK, I will track the blue line |
| Tracking the yellow line | $B026# | $A026# | OK, I will track the yellow line |
- Voice-controlled multi-point navigation
| Voice recognition content | Voice module sends to host | Host sends to voice module | Voice broadcast content |
|---|---|---|---|
| Go to the point A | $B019# | $A019# | OK, I'm going to the point A. |
| Go to the point B | $B020# | $A020# | OK, I'm going to the point B. |
| Go to the point C | $B021# | $A021# | 位 OK,I'm going to the point C. |
| Go to the point D | $B032# | $A032# | OK, I'm going to the point D. |