How to use ROS
Document link: SLAMWARE ROS SDK
Aurora is a newly developed sensor for integrated positioning and mapping created by SLAMTEC that integrates laser, vision, inertial navigation and deep learning technologies. The sensor does not require external dependencies and can provide six-degree-of-freedom positioning capabilities for indoor and outdoor three-dimensional high-precision mapping machines as soon as it is turned on.
1. Development environment requirements
Based on Ubuntu 20.04 / 22.04 operating system, and installed with ROS2 software package.
2. Download radar SDK
Download link: SLAMTEC Product Documents Download and Technical Support
Four versions of SDK have been placed in the attachment. Use the corresponding version according to the gcc version of your environment.
Aurora ROS2 SDK contains resources and codes that you may use during development. Its directory structure is organized as follows:
| Directory | Description |
|---|---|
| docs | Reference Documents |
| src | Source Code |
| --slamware_ros_sdk | ROS SDK Source Code Package |
| --slamware_sdk | SDK-related header files and library files |
| --aurora_remote_public | Aurora-related header files and library files |
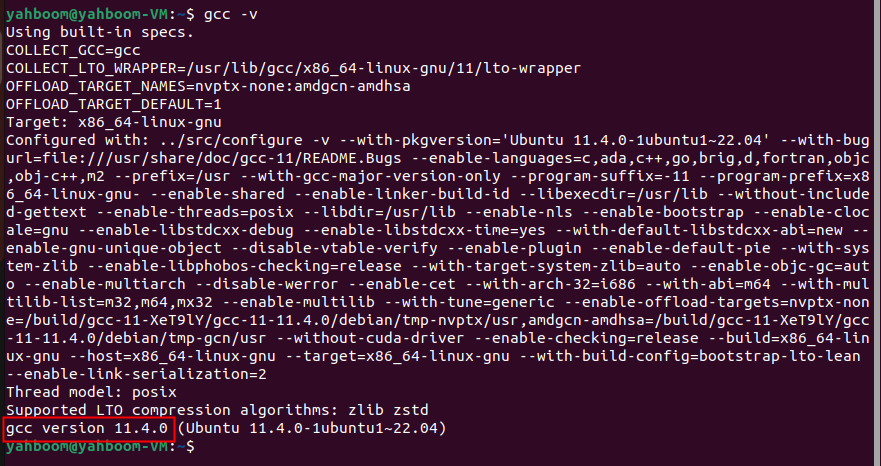
Terminal input, the following content can view the gcc version
gcc -v
3. Hardware Requirements
To use ROS2 SDK, you need an Auraro space mapping device, turn it on and configure the appropriate IP address. After the slamware_ros_sdk_server_node node is started, it will try to connect to the device. For factory devices, directly connect to the self-heating point of the Aurora radar.
4. Environment setup
If you use the factory virtual machine we provide, or other factory motherboard images, the following environment setup steps do not need to be rebuilt, and you can directly run the map building command.
4.1. Create a workspace first
xxxxxxxxxxmkdir -p ~/ros2_Ws/srccd ~/ros2_ws/srcPut the sdk source code you just downloaded in the src working directory where the source code is stored,
4.2 Compile
xxxxxxxxxxcd ..colcon buildIt is normal to have warnings when compiling slamware_sdk,

4.3 Configure the workspace system environment
xxxxxxxxxxsource install/setup.bashIn order to automatically load the environment every time the terminal is started: add the following command to ~/.bashrc
xxxxxxxxxxecho "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc4.4 Configure the system environment for dynamic library for image building
Since aurora_remote_public_lib is a dynamic library, you need to add the platform path to LD_LIBRARY_PATH. For example, if you place slamware_ros2_sdk_linux-x86_64-gcc11 in the ~/ros2_ws/sec folder, you need to add the following command to ~/.bashrc
Note: If you download the SDK for aarch64 environment, the corresponding name should be changed to slamware_ros2_sdk_linux-aarch64-gcc11.
xxxxxxxxxxexport LD_LIBRARY_PATH=~/ros2_ws/src/slamware_ros2_sdk_linux-x86_64-gcc11/src/aurora_remote_public/lib/linux_x86_64:$LD_LIBRARY_PATH4.5 Start the map node
Virtual machine version:
Open the virtual machine provided by the data. If the Aurora device is in AP mode, connect to the Aurora hotspot and run the following command in the terminal.
xxxxxxxxxxros2 launch slamware_ros_sdk slamware_ros_sdk_server_and_view.xml ip_address:=192.168.11.1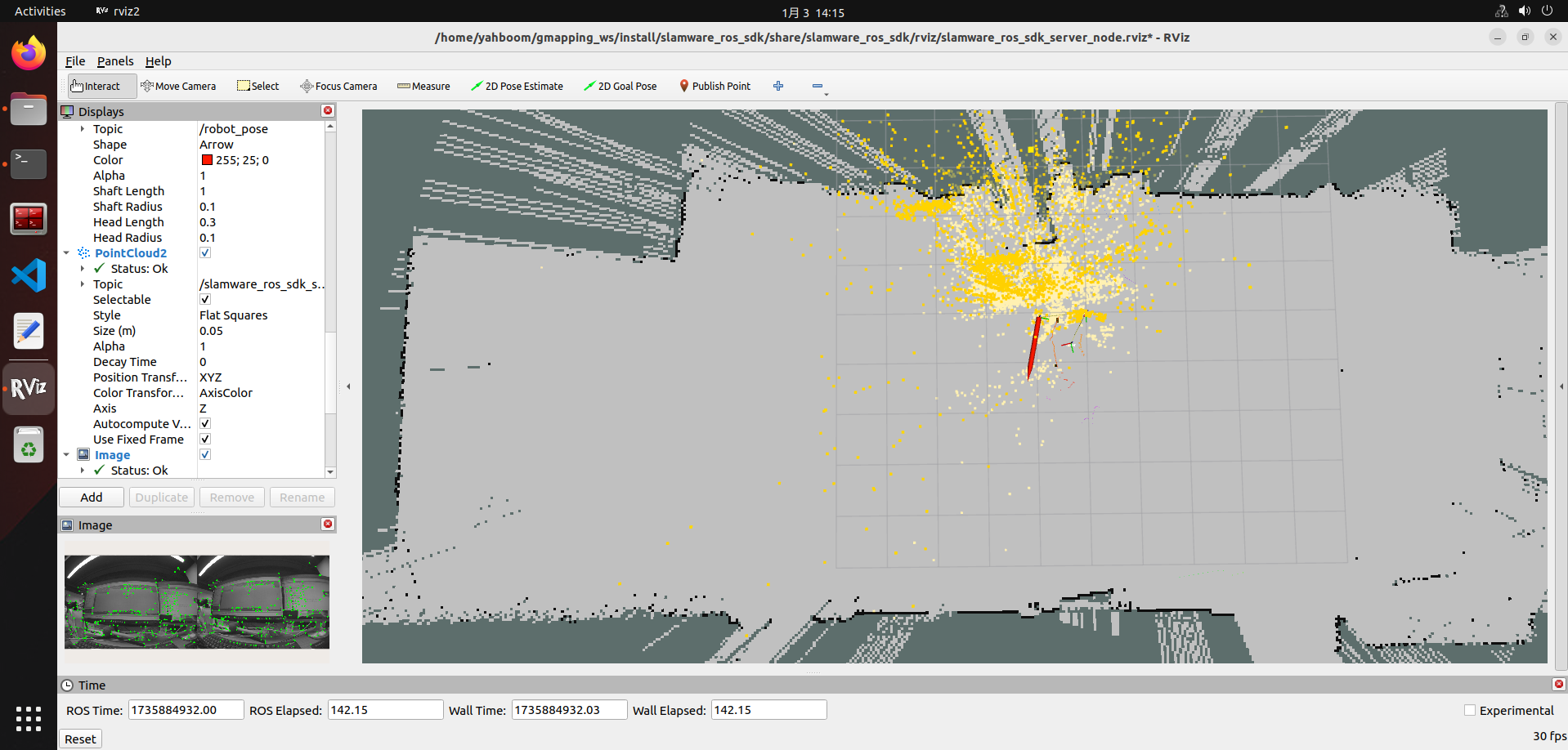
Orin nano version:
Use the monitor to connect the mainboard to the hotspot emitted by the radar, and enter the following command in the monitor terminal,
xxxxxxxxxxros2 launch slamware_ros_sdk slamware_ros_sdk_server_and_view.xml ip_address:=192.168.11.1
Raspberry Pi 5, X5, Jetson nano version:
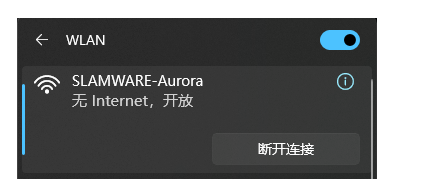
If it is the Raspberry Pi desktop version and jetson nano, x5 desktop version, after successfully booting up, connect the external monitor to the hotspot of Aurora radar to the motherboard, as shown below,
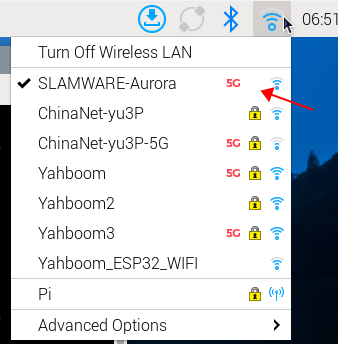
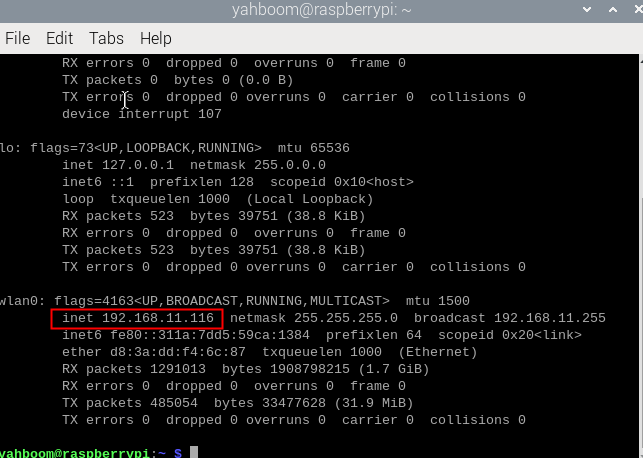
Then enter ifconfig in the terminal to view the ip address under the current hotspot, and then use this address for vnc remote desktop connection, (the premise is that the computer must also be connected to the hotspot emitted by Aurora radar)

Enter docker in advance and enter in the terminal
xxxxxxxxxxsh ros2_humble.sh
If the following interface appears, it means that you have successfully entered docker.

Then enter in the docker terminal,
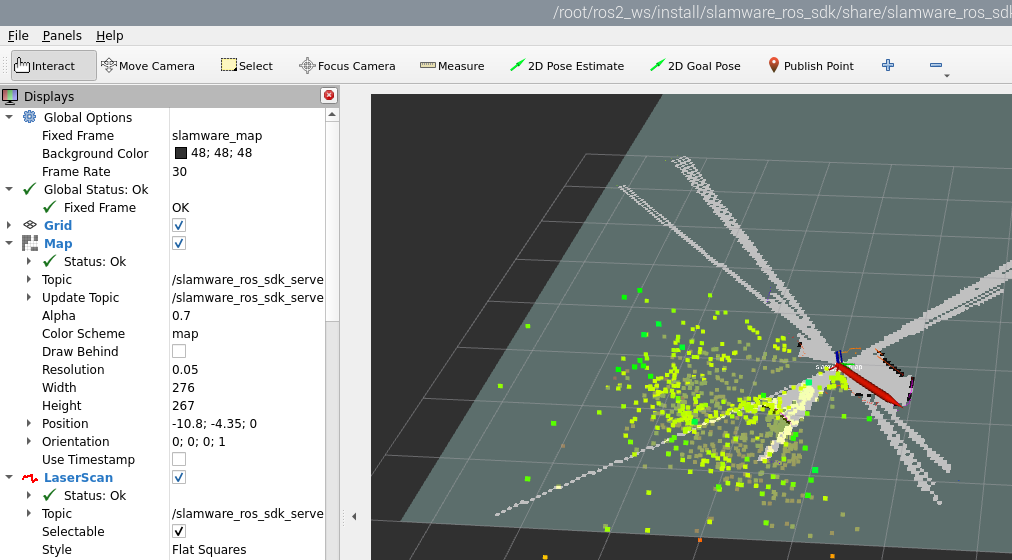
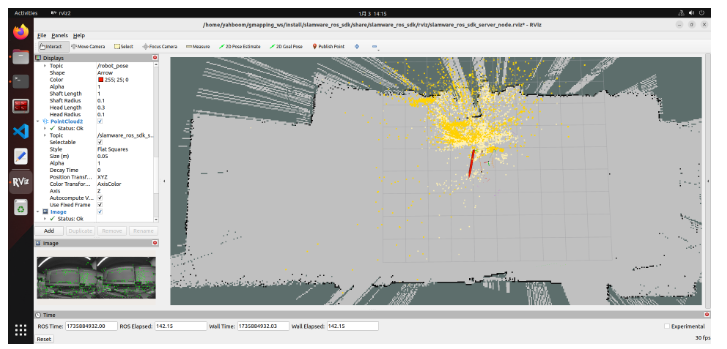
xxxxxxxxxxros2 launch slamware_ros_sdk slamware_ros_sdk_server_and_view.xml ip_address:=192.168.11.1If successful, you can view the map building screen.