Docker interaction
Docker interaction1. Bash script1.1, Basic use (Docker)1.2, Run the script2. Shared data2.1. Shared folder2.2. Shared network3. Shared hardware3.1. Shared graphical interface3.2, ordinary camera3.3, Depth Camera
The tutorial mainly introduces the data and hardware interaction between the host and Docker.
1. Bash script
Bash (Bourne Again SHell) is a scripting language for automated tasks. Users can combine multiple commands and execute them in sequence!
Docker commands provide optional parameters to start containers, but too many parameters will affect the reading and understanding of the command
1.1, Basic use (Docker)
Basic script
x#!/bin/bashdocker run -it \<image_name>:<tag> /bin/bash
Sample script
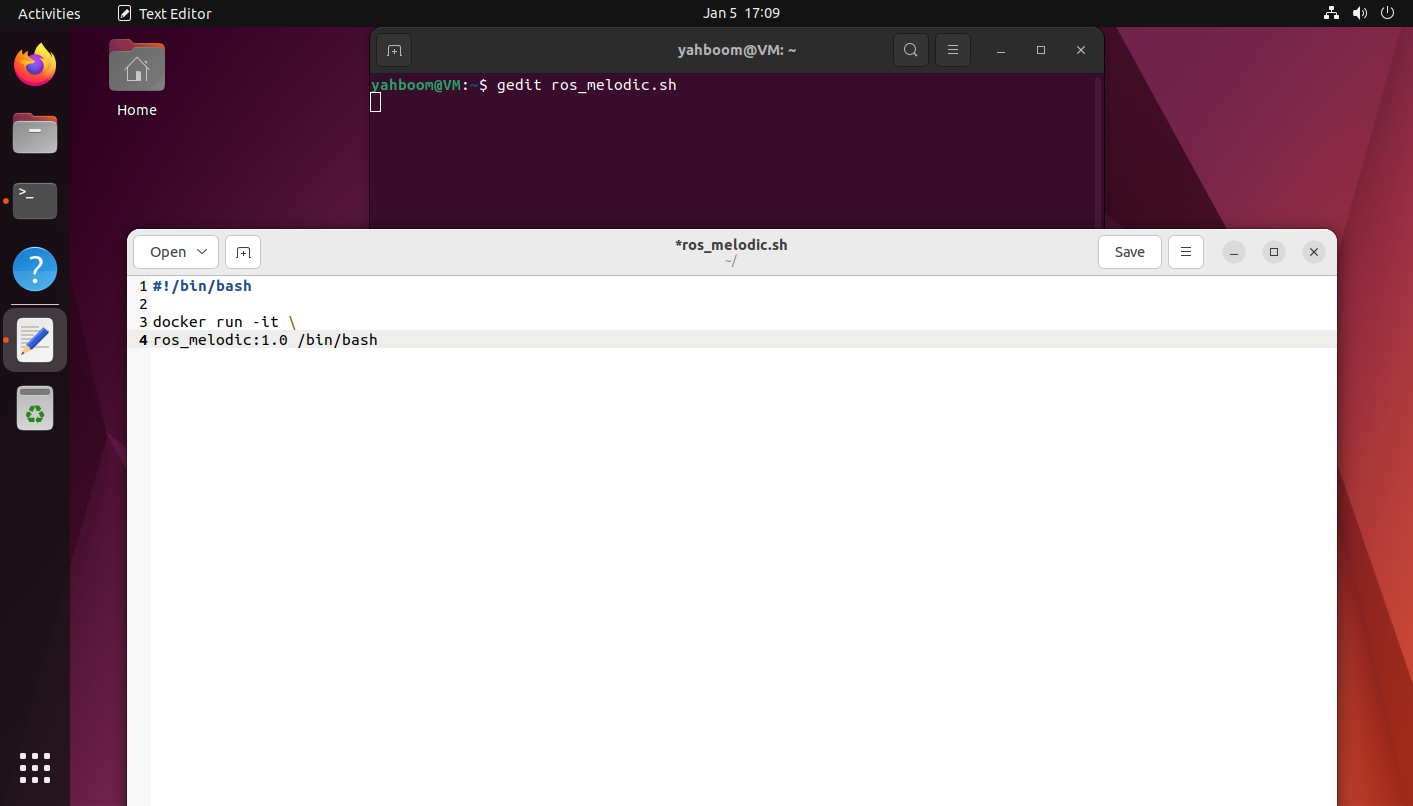
Write the example to the ros_melodic.sh file:
xxxxxxxxxxgedit ros_melodic.sh
xxxxxxxxxx#!/bin/bashdocker run -it \ros_melodic:1.0 /bin/bash
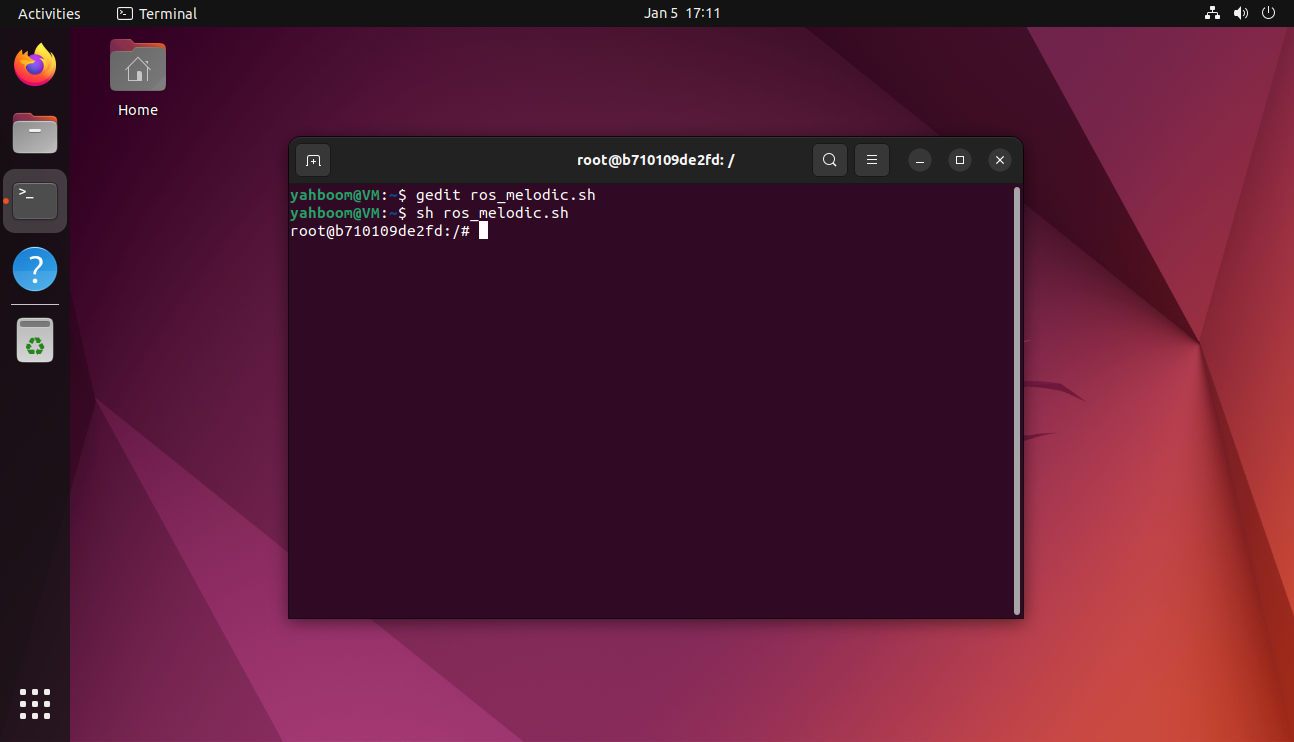
1.2, Run the script
xxxxxxxxxxsh ros_melodic.sh
2. Shared data
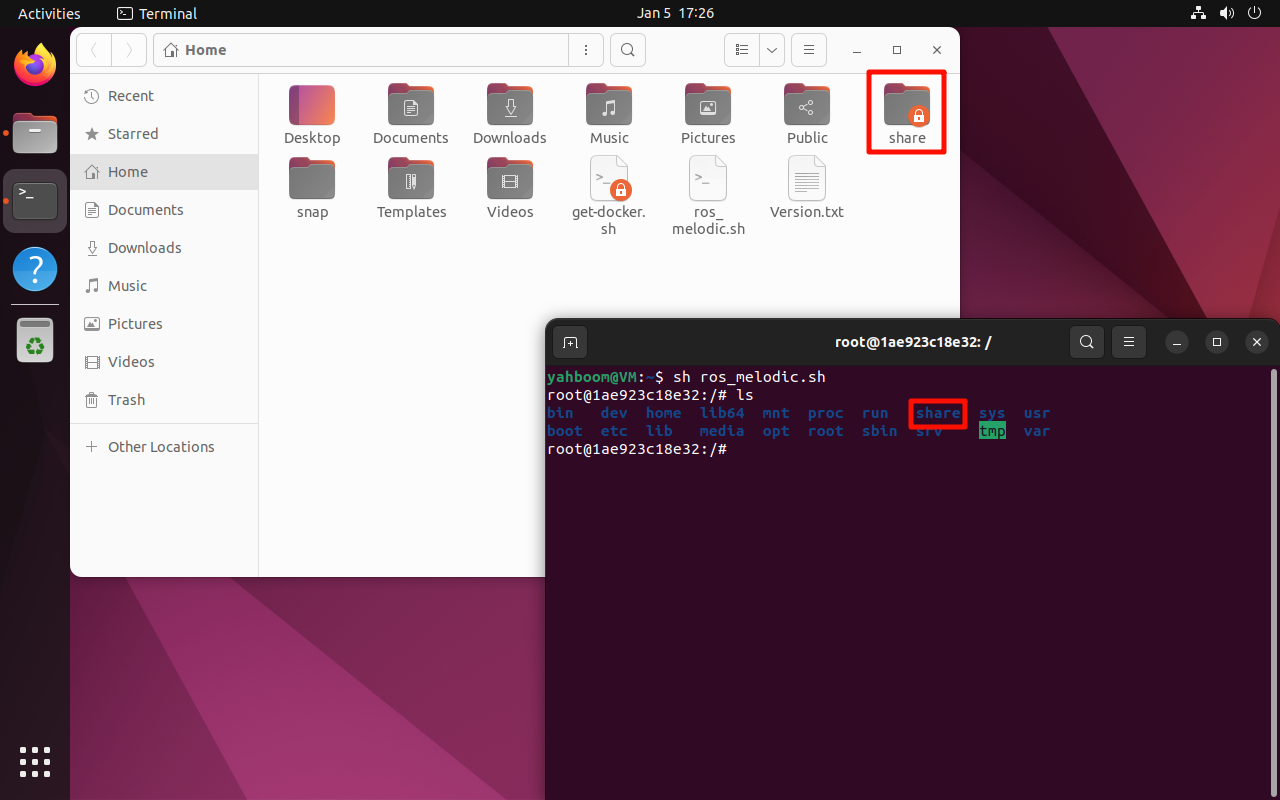
2.1. Shared folder
Share the host's share folder to Docker.
Sample script
xxxxxxxxxx#!/bin/bashdocker run -it \-v /home/yahboom/share:/share \ros_melodic:1.0 /bin/bash
2.2. Shared network
Share the host's network to Docker.
Sample script
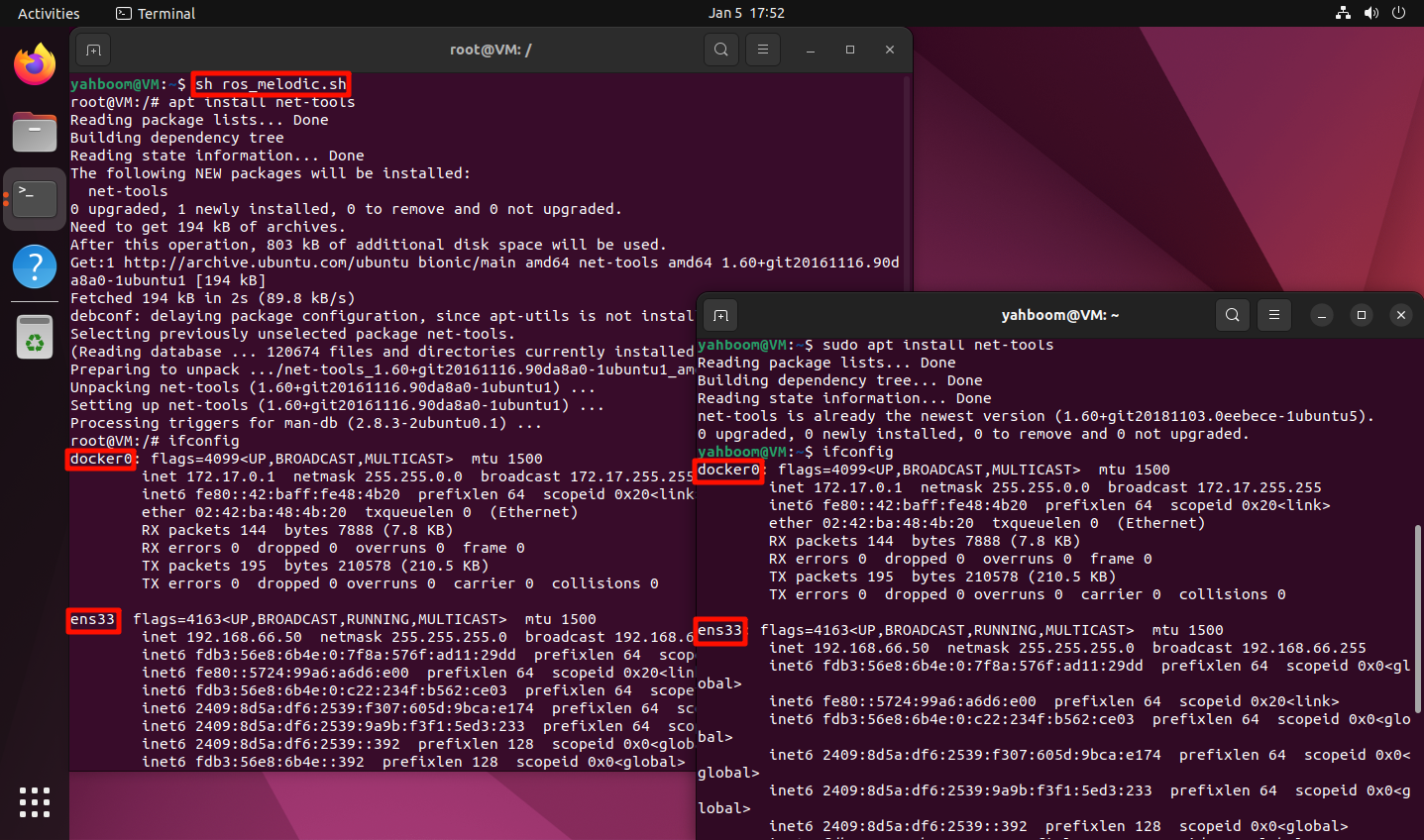
xxxxxxxxxx#!/bin/bashdocker run -it \--net=host \-v /home/yahboom/share:/share \ros_melodic:1.0 /bin/bash
If you cannot use the ifconfig command, install net-tools:
xxxxxxxxxxsudo apt install net-tools -y
xxxxxxxxxxifconfig
3. Shared hardware
3.1. Shared graphical interface
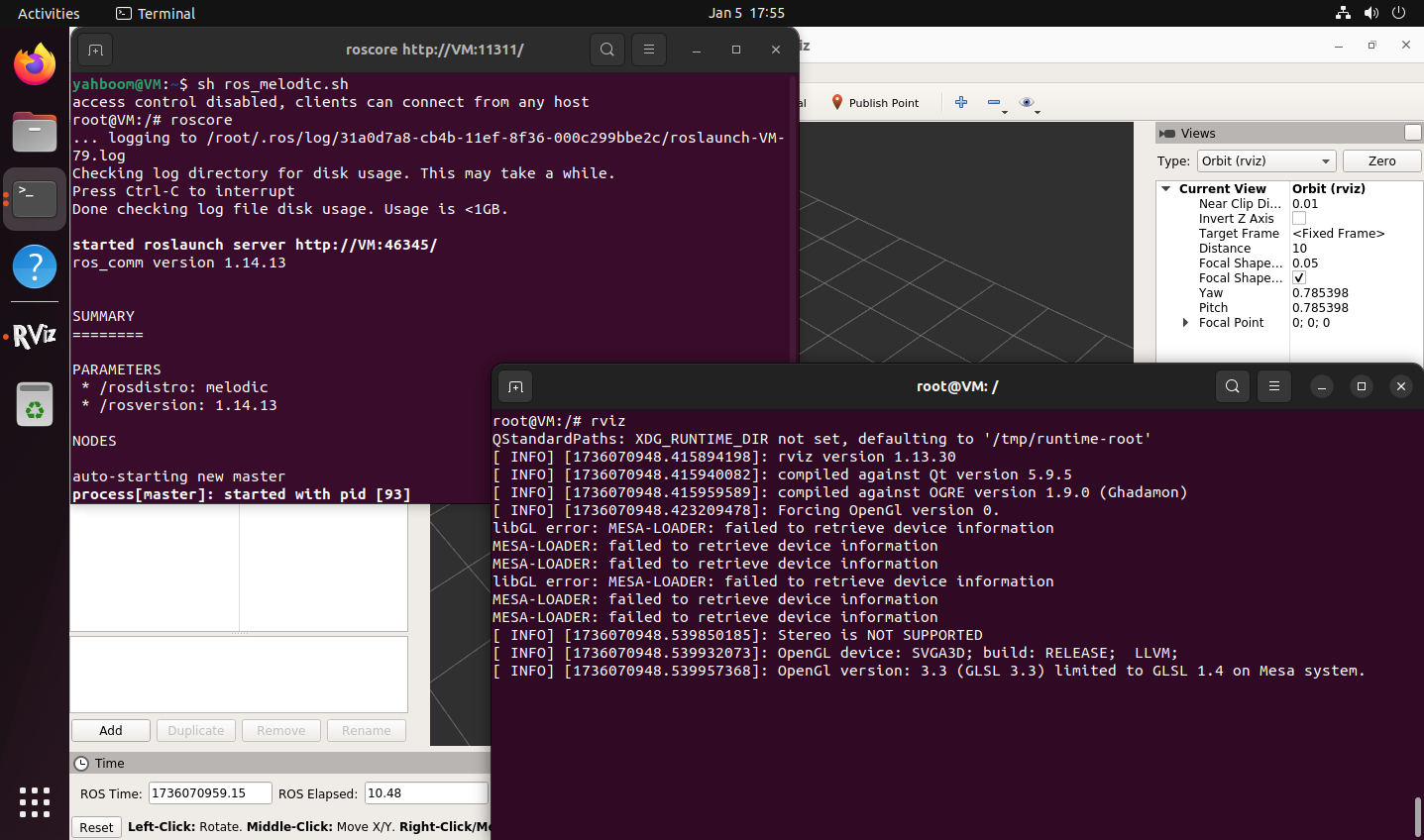
Docker runs graphical interface programs and needs to output to the local display graphical interface.
Sample script
xxxxxxxxxx#!/bin/bashxhost +docker run -it \--net=host \-e DISPLAY=$DISPLAY \-e "QT_X11_NO_MITSHM=1" \-v /tmp/.X11-unix:/tmp/.X11-unix \-v /home/yahboom/share:/share \ros_melodic:1.0 /bin/bash
3.2, ordinary camera
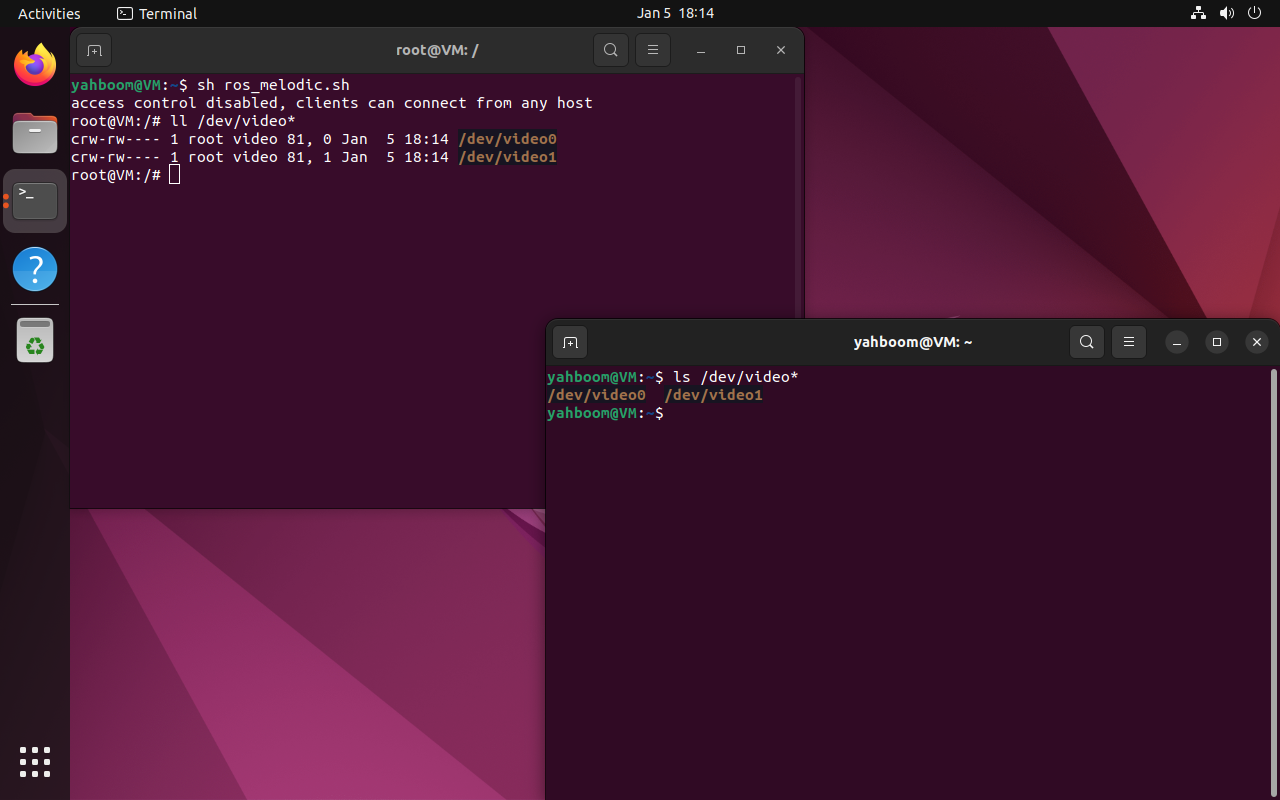
Ordinary camera mapping to Docker: just need to add the /dev/video* device number corresponding to the camera
xxxxxxxxxxIf only one camera is connected, it generally corresponds to /dev/video0
Sample script
xxxxxxxxxx#!/bin/bashxhost +docker run -it \--net=host \-e DISPLAY=$DISPLAY \-e "QT_X11_NO_MITSHM=1" \-v /tmp/.X11-unix:/tmp/.X11-unix \-v /home/yahboom/share:/share \--device=/dev/video0 \ros_melodic:1.0 /bin/bash
3.3, Depth Camera
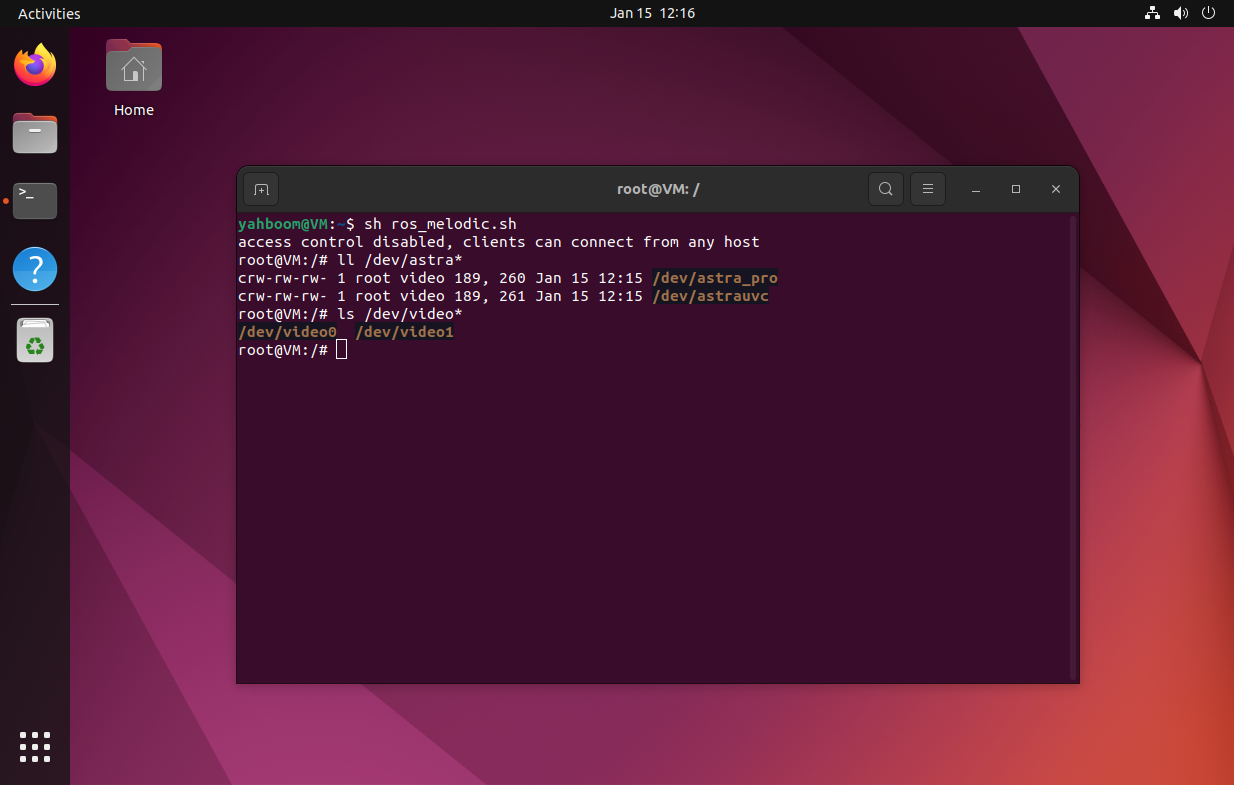
Compared with ordinary cameras, depth cameras require additional information to call the camera: Take Astra Pro as an example
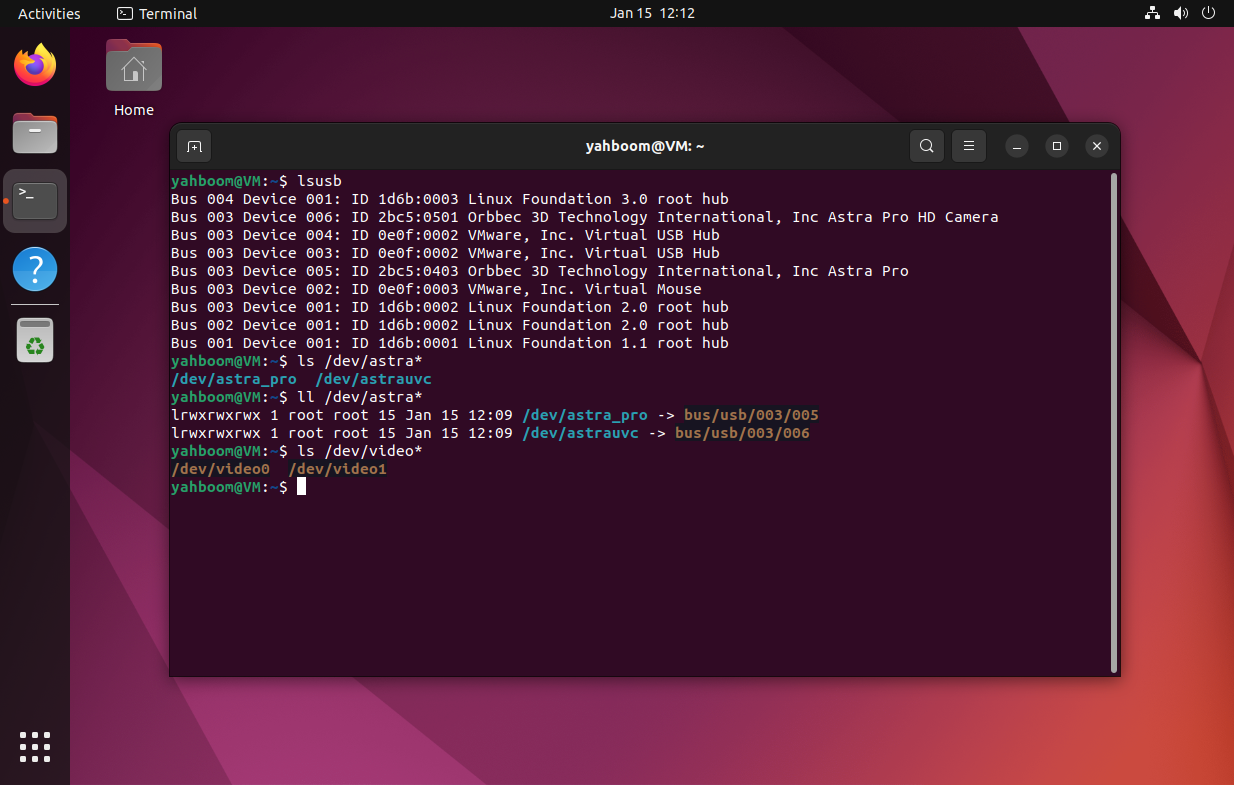
View USB device information
xxxxxxxxxxlsusb
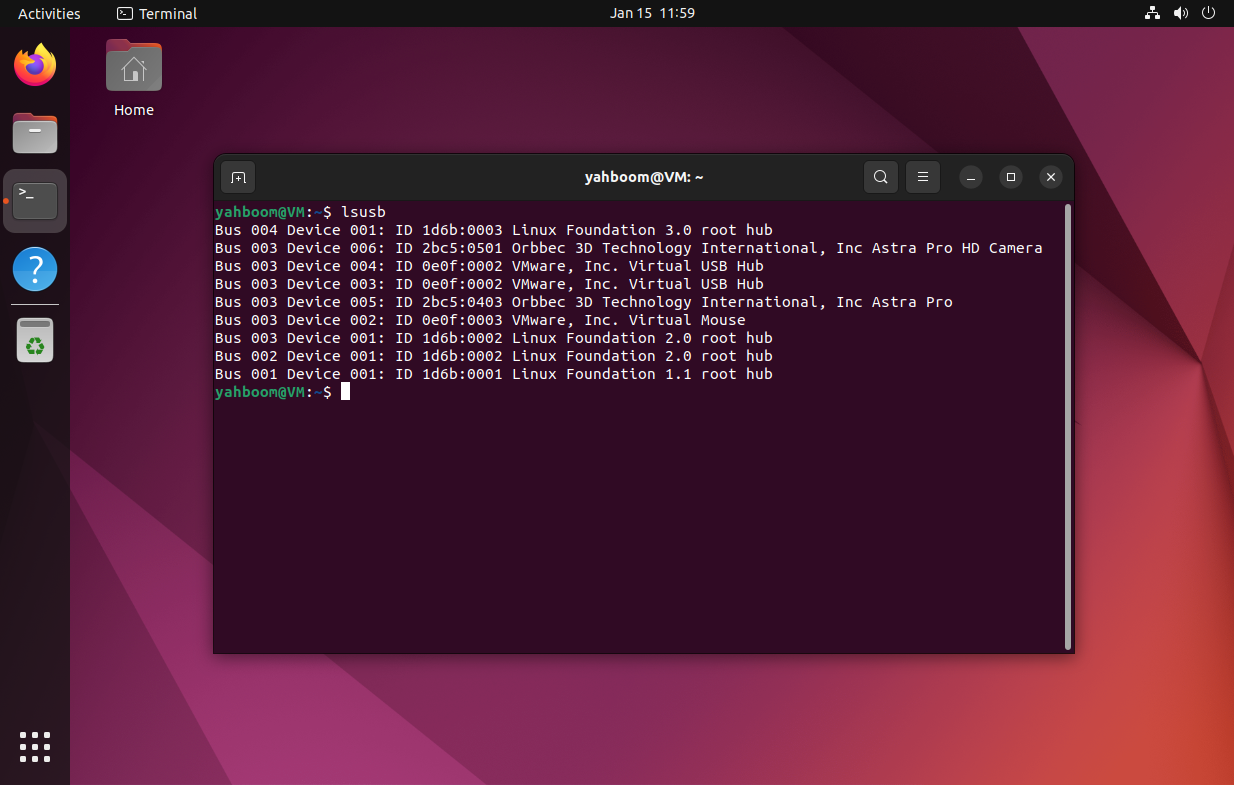
Information we need to pay attention to: USB bus number, device number on the USB bus, device vendor ID, product ID
xxxxxxxxxxBus 003 Device 005: ID 2bc5:0403 Orbbec 3D Technology International, Inc Astra ProBus 003 Device 006: ID 2bc5:0501 Orbbec 3D Technology International, Inc Astra Pro HD Camera
USB bus number: Bus 003
Device number on the USB bus: Device 005, Device 006
Vendor ID of the device: 2bc5
Product ID: 0403, 0501
Device can be located and device ID remapped based on vendor ID and product ID, where USB bus number and device number on USB bus affect the device connected in Docker.
Device ID remap
The binding process and method are not introduced here, and the results are directly displayed. Device ID remap is not part of this tutorial.
Every time you start docker, you need to pay attention to the USB bus number and device number on USB bus corresponding to the depth camera. If the two are inconsistent, the camera will always prompt that the device cannot be connected when it is started in Docker.
Sample Script
xxxxxxxxxx#!/bin/bashxhost +docker run -it \--net=host \-e DISPLAY=$DISPLAY \-e "QT_X11_NO_MITSHM=1" \-v /tmp/.X11-unix:/tmp/.X11-unix \-v /home/yahboom/share:/share \-v /dev/bus/usb/003/005:/dev/bus/usb/003/005 \-v /dev/bus/usb/003/006:/dev/bus/usb/003/006 \--device=/dev/astra_pro \--device=/dev/astrauvc \--device=/dev/video0 \--device=/dev/video1 \ros_melodic:1.0 /bin/bash