Oriented Bounding Boxes Object Detection
Oriented Bounding Boxes Object Detection1. Model introduction2. Oriented bounding box object detection: imageEffect preview3. Directed border object detection: videoEffect preview4. Directed border object detection: real-time detection4.1. USB cameraEffect preview4.2, CSI cameraEffect previewReferences
Use Python to demonstrate the effect of Ultralytics: Oriented Bounding Boxes Object Detection in image, video, and real-time detection.
1. Model introduction
Oriented bounding box object detection, also known as oriented object detection, goes a step further than standard object detection. It introduces an additional angle to more accurately locate objects in the image.
The output of the oriented object detector is a set of rotated bounding boxes that accurately surround objects in the image, as well as the category label and confidence score of each bounding box. Oriented bounding boxes are particularly useful when objects appear at different angles, such as in aerial images, where traditional axis-aligned bounding boxes may include unnecessary background.
In short, oriented object detection can accurately surround tilted objects with tilted boxes, thereby reducing unnecessary background areas and improving detection accuracy.
2. Oriented bounding box object detection: image
Use yolo11n-obb.pt to predict images under the ultralytics project (not ultralytics built-in images).
Enter the code folder:
cd /home/pi/ultralytics/ultralytics/yahboom_demo
Run the code:
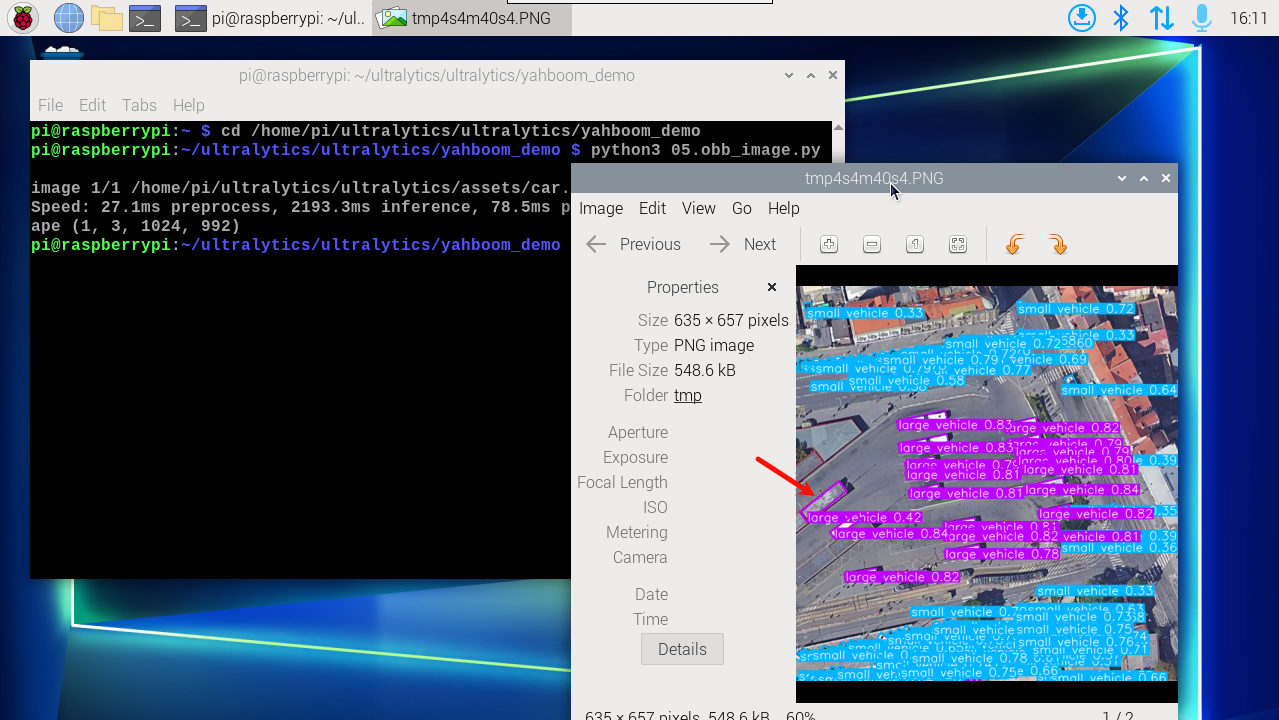
xxxxxxxxxxpython3 05.obb_image.py
Effect preview
Yolo recognition output image location: /home/pi/ultralytics/ultralytics/output/
Sample code:
xfrom ultralytics import YOLO# Load a modelmodel = YOLO("/home/pi/ultralytics/ultralytics/yolo11n-obb.pt")# Run batched inference on a list of imagesresults = model("/home/pi/ultralytics/ultralytics/assets/car.jpg") # return a list of Results objects# Process results listfor result in results: # boxes = result.boxes # Boxes object for bounding box outputs # masks = result.masks # Masks object for segmentation masks outputs # keypoints = result.keypoints # Keypoints object for pose outputs # probs = result.probs # Probs object for classification outputs obb = result.obb # Oriented boxes object for OBB outputs result.show() # display to screen result.save(filename="/home/pi/ultralytics/ultralytics/output/car_output.jpg") # save to disk3. Directed border object detection: video
Use yolo11n-obb.pt to predict the video under the ultralytics project (not the video that comes with ultralytics).
Enter the code folder:
xxxxxxxxxxcd /home/pi/ultralytics/ultralytics/yahboom_demo
Run the code:
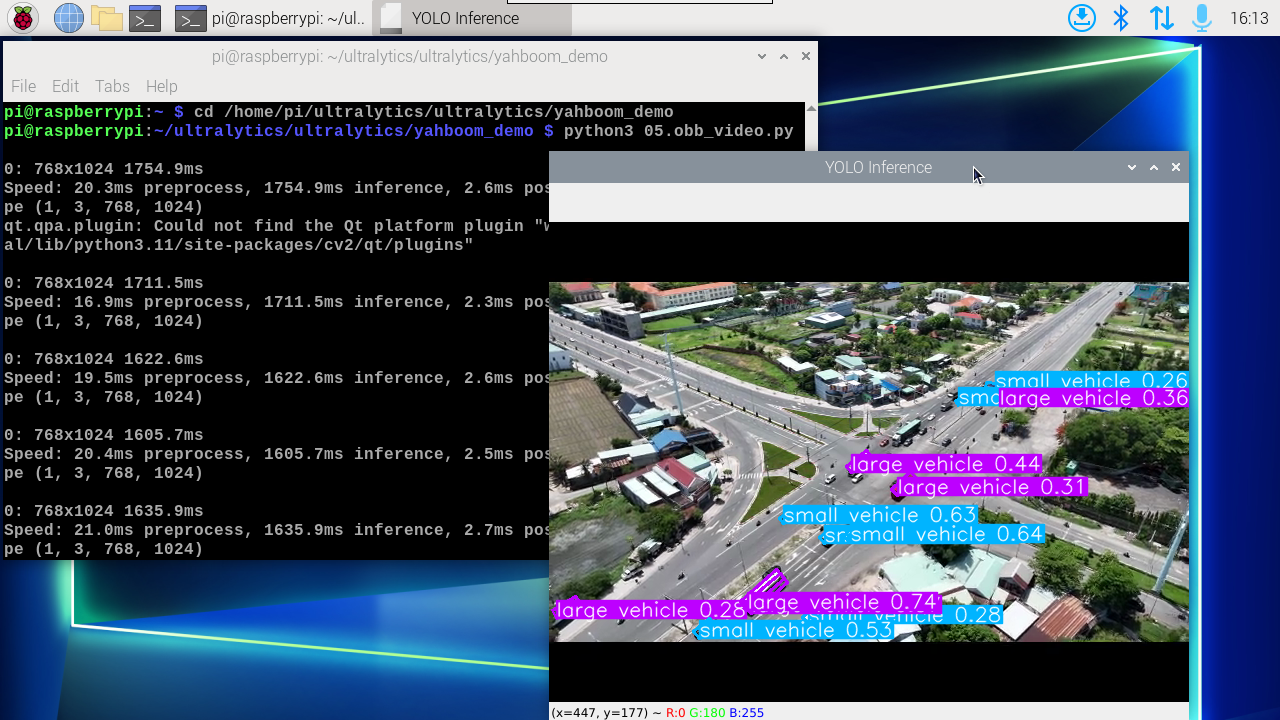
xxxxxxxxxxpython3 05.obb_video.py
Effect preview
Video location of yolo recognition output: /home/pi/ultralytics/ultralytics/output/
Sample code:
xxxxxxxxxximport cv2from ultralytics import YOLO# Load the YOLO modelmodel = YOLO("/home/pi/ultralytics/ultralytics/yolo11n-obb.pt")# Open the video filevideo_path = "/home/pi/ultralytics/ultralytics/videos/street.mp4"cap = cv2.VideoCapture(video_path)# Get the video frame size and frame rateframe_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))fps = int(cap.get(cv2.CAP_PROP_FPS))# Define the codec and create a VideoWriter object to output the processed videooutput_path = "/home/pi/ultralytics/ultralytics/output/05.street_output.mp4"fourcc = cv2.VideoWriter_fourcc(*'mp4v') # You can use 'XVID' or 'mp4v' depending on your platformout = cv2.VideoWriter(output_path, fourcc, fps, (frame_width, frame_height))# Loop through the video frameswhile cap.isOpened(): # Read a frame from the video success, frame = cap.read() if success: # Run YOLO inference on the frame results = model(frame) # Visualize the results on the frame annotated_frame = results[0].plot() # Write the annotated frame to the output video file out.write(annotated_frame) # Display the annotated frame cv2.imshow("YOLO Inference", cv2.resize(annotated_frame, (640, 480))) # Break the loop if 'q' is pressed if cv2.waitKey(1) & 0xFF == ord("q"): break else: # Break the loop if the end of the video is reached break# Release the video capture and writer objects, and close the display windowcap.release()out.release()cv2.destroyAllWindows()4. Directed border object detection: real-time detection
4.1. USB camera
Use yolo11n-obb.pt to predict the USB camera screen.
Enter the code folder:
xxxxxxxxxxcd /home/pi/ultralytics/ultralytics/yahboom_demo
Run the code: Click the preview screen and press the q key to terminate the program!
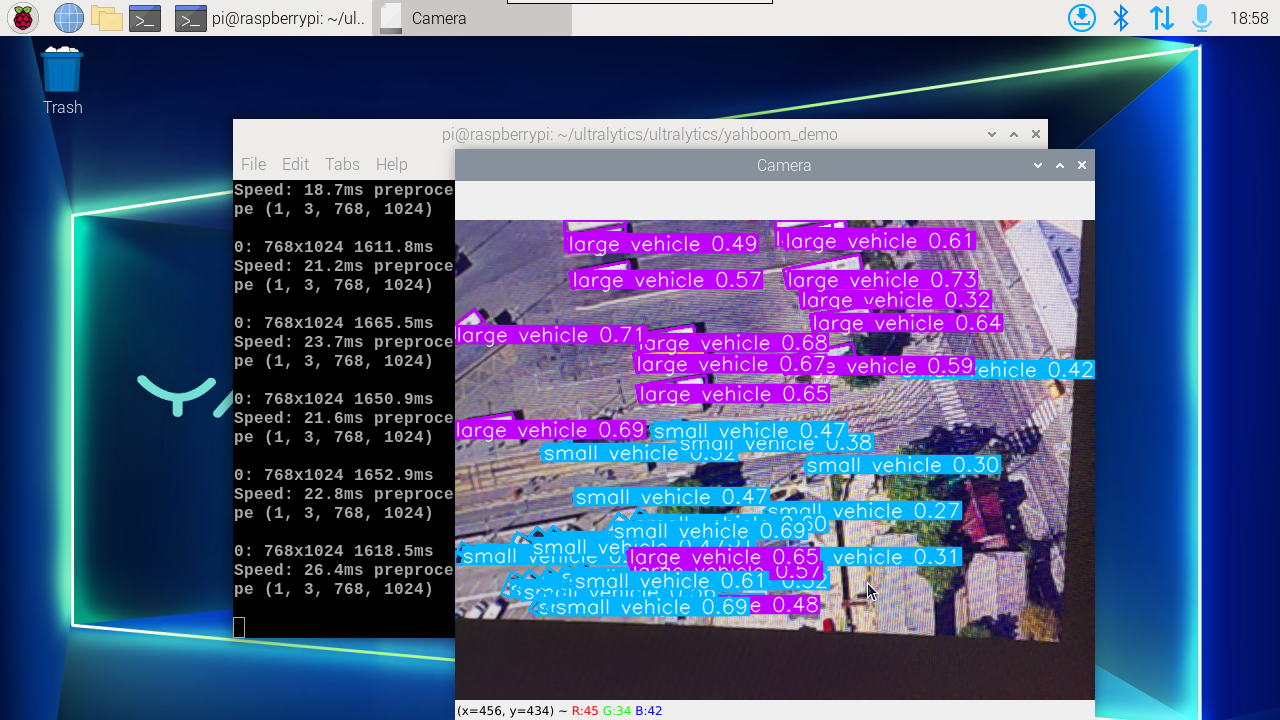
xxxxxxxxxxpython3 05.obb_camera_usb.py
Effect preview
Yolo recognizes the output video location: /home/pi/ultralytics/ultralytics/output/

Sample code:
xxxxxxxxxximport cv2from ultralytics import YOLO# Load the YOLO modelmodel = YOLO("/home/pi/ultralytics/ultralytics/yolo11n-obb.pt")# Open the cammeracap = cv2.VideoCapture(0)# Get the video frame size and frame rateframe_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))fps = int(cap.get(cv2.CAP_PROP_FPS))# Define the codec and create a VideoWriter object to output the processed videooutput_path = "/home/pi/ultralytics/ultralytics/output/05.obb_camera_usb.mp4"fourcc = cv2.VideoWriter_fourcc(*'mp4v') # You can use 'XVID' or 'mp4v' depending on your platformout = cv2.VideoWriter(output_path, fourcc, fps, (frame_width, frame_height))# Loop through the video frameswhile cap.isOpened(): # Read a frame from the video success, frame = cap.read() if success: # Run YOLO inference on the frame results = model(frame) # Visualize the results on the frame annotated_frame = results[0].plot() # Write the annotated frame to the output video file out.write(annotated_frame) # Display the annotated frame cv2.imshow("YOLO Inference", cv2.resize(annotated_frame, (640, 480))) # Break the loop if 'q' is pressed if cv2.waitKey(1) & 0xFF == ord("q"): break else: # Break the loop if the end of the video is reached break# Release the video capture and writer objects, and close the display windowcap.release()out.release()cv2.destroyAllWindows()4.2, CSI camera
Use yolo11n-obb.pt to predict the CSI camera screen.
Enter the code folder:
xxxxxxxxxxcd /home/pi/ultralytics/ultralytics/yahboom_demo
Run the code: Click the preview screen, press the q key to terminate the program!
xxxxxxxxxxpython3 05.obb_camera_csi.py
Effect preview
Yolo recognizes the output video location: /home/pi/ultralytics/ultralytics/output/
Sample code:
xxxxxxxxxximport cv2from ultralytics import YOLOfrom jetcam.csi_camera import CSICamera# Load the YOLO modelmodel = YOLO("/home/pi/ultralytics/ultralytics/yolo11n-obb.pt")# Open the camera (CSI Camera)cap = CSICamera(capture_device=0, width=640, height=480)# Get the video frame size and frame rateframe_width = 640frame_height = 480fps = 30# Define the codec and create a VideoWriter object to output the processed videooutput_path = "/home/pi/ultralytics/ultralytics/output/05.obb_camera_csi.mp4"fourcc = cv2.VideoWriter_fourcc(*'mp4v') # You can use 'XVID' or 'mp4v' depending on your platformout = cv2.VideoWriter(output_path, fourcc, fps, (frame_width, frame_height))# Loop through the video frameswhile True: # Read a frame from the camera frame = cap.read() if frame is not None: # Run YOLO inference on the frame results = model(frame) # Visualize the results on the frame annotated_frame = results[0].plot() # Write the annotated frame to the output video file out.write(annotated_frame) # Display the annotated frame cv2.imshow("YOLO Inference", cv2.resize(annotated_frame, (640, 480))) # Break the loop if 'q' is pressed if cv2.waitKey(1) & 0xFF == ord("q"): break else: # Break the loop if no frame is received (camera error or end of stream) print("No frame received, breaking the loop.") break# Release the video capture and writer objects, and close the display windowcap.release()out.release()cv2.destroyAllWindows()