5. Robot calibration
1. Program function description
After the program is run, the parameters are adjusted here through the dynamic parameter adjuster to calibrate the linear speed and angular speed of the car. Taking the X3 model as an example, the intuitive expression of the calibrated linear speed is to give the car an instruction to walk straight forward 1 meter to see how far it actually ran and whether it is within the error range; the intuitive expression of the calibrated angular speed is to let the car rotate 360 degrees and see Whether the angle of the car's rotation is within the error range.
2. Program code reference path
Raspberry Pi PI5 master needs to enter the docker container first, Orin motherboard does not need to enter,
the location of the source code of this function is:
xxxxxxxxxx#Calibration linear speed source code~/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_bringup/yahboomcar_bringup/ calibrate_linear_X3.py#Calibration angular velocity source code~/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_bringup/yahboomcar_bringup/ calibrate_angular_X33. Program startup
according to the actual car model, taking X3 as an example, enter in the terminal,
x#chassisdriveros2 launch yahboomcar_bringup yahboomcar_bringup_X3_launch.py
#Linear velocity and angular velocity run separately#calibration line speedros2 run yahboomcar_bringup calibrate_linear_X3#calibration angular velocityros2 run yahboomcar_bringup calibrate_angular_X3
#Dynamic parameter adjustmentros2 run rqt_reconfigure rqt_reconfigure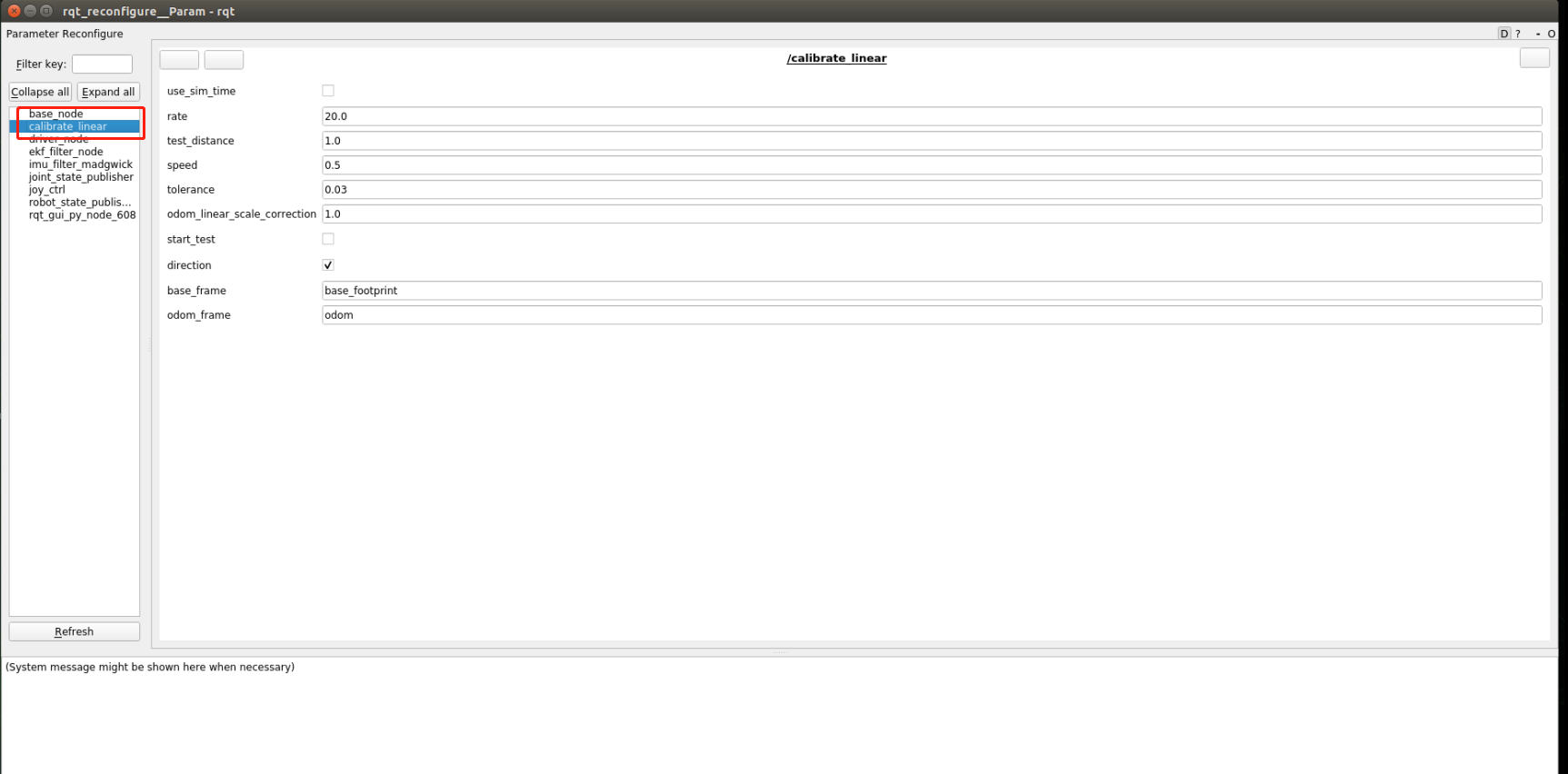
Taking the calibration of linear speed as an example, click "start_test" to calibrate the linear speed of the car in the x direction, and observe whether the car has moved the test_distance distance. The default setting here is 1m. You can customize the test distance before calibration. It must be a decimal. After setting, click blank. , the program will automatically write. If the distance the car moves exceeds the acceptable error range (the value of the tolerance variable), then the value of odom_linear_scale_correction is set. The following is the meaning of each parameter,
| Parameters | Meaning |
|---|---|
| rate | publishing frequency (no need to modify) |
| test_distance | Distance to test linear speed |
| speed | linear speed |
| tolerance | acceptable error value |
| odom_linear_scale_correction | Scale coefficient |
| start_test | Start testing |
| direction | direction (line speed test X (1) Y (0) direction) |
| base_frame | Monitor the parent coordinates of TF transformation |
| odom_frame | Monitor the sub-coordinates of TF transformation |
The variable settings for testing angular velocity are roughly the same, except that test_distance becomes test_angle and speed becomes the angular velocity.
After the test is completed, remember the values of [odom_linear_scale_correction] and [odom_angular_scale_correction], and modify them to the values of the parameters linear_scale_x, linear_scale_y, and angular_scale in yahboomcar_bringup_X3_launch.py.
4. Program core source code analysis
This program is mainly implemented by using TF to monitor the transformation between coordinates. By monitoring the coordinate transformation between base_footprint and odom, the robot can know "how far I have walked now/how many degrees I have turned now."
Taking calibrate_linear_X3.py as an example, the core code is as follows:
xxxxxxxxxx#Listen to TF transformationdef get_position(self):try:now = rclpy.time.Time()trans = self.tf_buffer.lookup_transform(self.odom_frame,self.base_frame,now)return transexcept (LookupException, ConnectivityException, ExtrapolationException):self.get_logger().info('transform not ready')raisereturn#Get the current xy coordinates and calculate the distance based on the previous xy coordinatesself.position.x = self.get_position().transform.translation.xself.position.y = self.get_position().transform.translation.yprint("self.position.x: ",self.position.x)print("self.position.y: ",self.position.y)distance = sqrt(pow((self.position.x - self.x_start), 2) + pow((self.position.y - self.y_start), 2))distance *= self.odom_linear_scale_correctioncalibrate_angular_X3 core code is as follows,
xxxxxxxxxx#Here we also monitor the TF transformation and obtain the current pose information, but we also perform a conversion here, converting the quaternion to Euler angle conversion, and then returndef get_odom_angle(self):try:now = rclpy.time.Time()rot = self.tf_buffer.lookup_transform(self.odom_frame,self.base_frame,now)#print("oring_rot: ",rot.transform.rotation)cacl_rot = PyKDL.Rotation.Quaternion(rot.transform.rotation.x, rot.transform.rotation.y, rot.transform.rotation.z, rot.transform.rotation.w)#print("cacl_rot: ",cacl_rot)angle_rot = cacl_rot.GetRPY()[2]#print("angle_rot: ",angle_rot)except (LookupException, ConnectivityException, ExtrapolationException):self.get_logger().info('transform not ready')return#Calculate the rotation angleself.odom_angle = self.get_odom_angle()self.delta_angle = self.odom_angular_scale_correction * self.normalize_angle(self.odom_angle - self.first_angle)The published TF transformation is published at the base_node node, and the code path is,
xxxxxxxxxx~/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_base_node/src/base_node_X3This node will receive /vel_raw data, publish odom data through mathematical calculations, and also publish TF transformation. The core code is as follows,
#Calculate the xy coordinates and xyzw quaternion values. The xy two-point coordinates represent the position, and the xyzw quaternion represents the attitude.double delta_heading = angular_velocity_z_ * vel_dt_; //radiansdouble delta_x = (linear_velocity_x_ * cos(heading_)-linear_velocity_y_*sin(heading_)) * vel_dt_; //mdouble delta_y = (linear_velocity_x_ * sin(heading_)+linear_velocity_y_*cos(heading_)) * vel_dt_; //mx_pos_ += delta_x;y_pos_ += delta_y;heading_ += delta_heading;tf2::Quaternion myQuaternion;geometry_msgs::msg::Quaternion odom_quat;myQuaternion.setRPY(0.00,0.00,heading_ );#Publish TF transformationgeometry_msgs::msg::TransformStamped t;rclcpp::Time now = this->get_clock()->now();t.header.stamp = now;t.header.frame_id = "odom";t.child_frame_id = "base_footprint";t.transform.translation.x = x_pos_;t.transform.translation.y = y_pos_;t.transform.translation.z = 0.0;t.transform.rotation.x = myQuaternion.x();t.transform.rotation.y = myQuaternion.y();t.transform.rotation.z = myQuaternion.z();t.transform.rotation.w = myQuaternion.w();tf_broadcaster_->sendTransform(t);