Face Detection
1. Introduction
MediaPipe is an open-source data stream processing machine learning application development framework developed by Google. It is a graph-based data processing pipeline used to build data sources in various forms, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (such as Jetson nano), mobile devices (iOS and Android), workstations and servers, and supports mobile GPU acceleration. MediaPipe provides cross-platform, customizable ML solutions for real-time and streaming media. The core framework of MediaPipe is implemented in C++ and provides support for languages such as Java and Objective C. The main concepts of MediaPipe include packets, streams, calculators, graphs, and subgraphs.
Features of MediaPipe:
End-to-end acceleration: built-in fast ML inference and processing can be accelerated even on commodity hardware.
Build once, deploy anywhere: unified solution for Android, iOS, desktop/cloud, web and IoT.
Ready-to-use solution: cutting-edge ML solution that demonstrates the full capabilities of the framework.
Free and open source: framework and solution under Apache2.0, fully extensible and customizable.
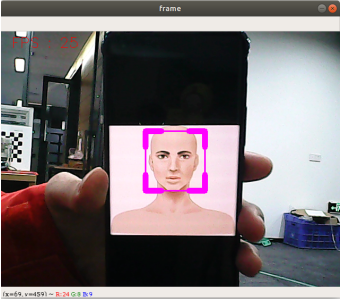
2. Face detection
2.1. Start
Enter the following command to start the program
xxxxxxxxxxros2 run dofbot_pro_mediapipe 05_FaceDetection
2.2. Source code
Source code location: ~/dofbot_pro_ws/src/dofbot_pro_mediapipe/dofbot_pro_mediapipe/05_FaceDetection.py
xxxxxxxxxx#!/usr/bin/env python3# encoding: utf-8
import mediapipe as mpimport cv2 as cvimport timeimport rclpyfrom rclpy.node import Nodefrom sensor_msgs.msg import Imagefrom cv_bridge import CvBridge
class FaceDetector(Node): def __init__(self, minDetectionCon=0.5): super().__init__('face_detector') self.publisher_ = self.create_publisher(Image, 'face_detected', 10) self.timer = self.create_timer(0.1, self.timer_callback) self.bridge = CvBridge() self.mpFaceDetection = mp.solutions.face_detection self.mpDraw = mp.solutions.drawing_utils self.facedetection = self.mpFaceDetection.FaceDetection(min_detection_confidence=minDetectionCon) self.capture = cv.VideoCapture(0, cv.CAP_V4L2) self.capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G')) self.capture.set(cv.CAP_PROP_FRAME_WIDTH, 640) self.capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480) self.pTime = 0
def timer_callback(self): ret, frame = self.capture.read() if not ret: self.get_logger().error('Failed to capture frame') return frame, _ = self.findFaces(frame) # Calculate FPS cTime = time.time() fps = 1 / (cTime - self.pTime) self.pTime = cTime # Display FPS on frame cv.putText(frame, f'FPS: {int(fps)}', (20, 50), cv.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2) msg = self.bridge.cv2_to_imgmsg(frame, "bgr8") self.publisher_.publish(msg)
# Show the frame with face detection cv.imshow('Face Detection', frame) if cv.waitKey(1) & 0xFF == ord('q'): self.capture.release() cv.destroyAllWindows() rclpy.shutdown()
def findFaces(self, frame): img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB) self.results = self.facedetection.process(img_RGB) bboxs = [] if self.results.detections: for id, detection in enumerate(self.results.detections): bboxC = detection.location_data.relative_bounding_box ih, iw, ic = frame.shape bbox = int(bboxC.xmin * iw), int(bboxC.ymin * ih), \ int(bboxC.width * iw), int(bboxC.height * ih) bboxs.append([id, bbox, detection.score]) frame = self.fancyDraw(frame, bbox) cv.putText(frame, f'{int(detection.score[0] * 100)}%', (bbox[0], bbox[1] - 20), cv.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 2) return frame, bboxs
def fancyDraw(self, frame, bbox, l=30, t=10): x, y, w, h = bbox x1, y1 = x + w, y + h cv.rectangle(frame, (x, y), (x + w, y + h), (255, 0, 255), 2) # Top left x,y cv.line(frame, (x, y), (x + l, y), (255, 0, 255), t) cv.line(frame, (x, y), (x, y + l), (255, 0, 255), t) # Top right x1,y cv.line(frame, (x1, y), (x1 - l, y), (255, 0, 255), t) cv.line(frame, (x1, y), (x1, y + l), (255, 0, 255), t) # Bottom left x1,y1 cv.line(frame, (x, y1), (x + l, y1), (255, 0, 255), t) cv.line(frame, (x, y1), (x, y1 - l), (255, 0, 255), t) # Bottom right x1,y1 cv.line(frame, (x1, y1), (x1 - l, y1), (255, 0, 255), t) cv.line(frame, (x1, y1), (x1, y1 - l), (255, 0, 255), t) return frame
def main(args=None): rclpy.init(args=args) face_detector = FaceDetector() rclpy.spin(face_detector) face_detector.destroy_node() rclpy.shutdown()
if __name__ == '__main__': main()