Use of force-controlled grippers
What you will learn in this chapter
How to use myBlockly to control the force-controlled gripper attached to the myCobot 320 M5Stack robot arm
Some API displays
Module 1:
Set Pro Force Control Claw Parameters
Applicable scope: ER myCobot 320 series, ER Mercury series, ER myCobot Pro 600, ERmyCobot Pro 630, other general robots
Function: Set the parameters of the Pro force-controlled gripper. You can set a variety of parameter functions. Please see the following table for details.
parameter:
Gripper ID: gripper_id, the default value is 14, and the value range is 1 ~ 254.
The command number of the gripper: address.
Parameter value: value.
| Function | gripper_id | address | value |
|---|---|---|---|
| Set the gripper ID | 14 | 3 | 1 ~ 254 |
| Set the gripper enable state | 14 | 10 | 0 or 1, 0 - disable; 1 - enable |
| Set the clockwise runnable error of the gripper | 14 | 21 | 0 ~ 16 |
| Set the anti-clockwise runnable error of the gripper | 14 | 23 | 0 ~ 16 |
| Setting the minimum actuation force of the gripper | 14 | 25 | 0 ~ 254 |
| IO output settings | 14 | 29 | 0, 1, 16, 17 |
| Set the IO opening angle | 14 | 30 | 0 ~ 100 |
| Set IO closing angle | 14 | 31 | 0 ~ 100 |
| Set the virtual position value of the servo | 14 | 41 | 0 ~ 100 |
| Setting the holding current | 14 | 43 | 1 ~ 254 |
Module 2:
Set Pro Force Control Claw Angle

Applicable scope: ER myCobot 320 series, ER Mercury series, ER myCobot Pro 600, ERmyCobot Pro 630, other general robots
Function: Set the angle of the force-controlled gripper.
parameter:
Gripper ID: Default is 14, value range is 1 ~ 254.
Gripper angle: value range is 0 ~ 100.
Module 3:
Set Pro Force Control Claw Torque

Applicable scope: ER myCobot 320 series, ER Mercury series, ER myCobot Pro 600, ERmyCobot Pro 630, other general robots
Function: Set the torque of the force-controlled gripper.
parameter:
Gripper ID: Default is 14, value range is 1 ~ 254.
Torque value: range is 1 ~ 100.
Module 4:
Read the torque of the Pro force control gripper

Applicable scope: ER myCobot 320 series, ER Mercury series, ER myCobot Pro 600, ERmyCobot Pro 630, other general robots
Function: Read the torque of the force-controlled gripper.
parameter:
Gripper ID: Default is 14, value range is 1 ~ 254.
Simple Demo
The graphics code is as follows:
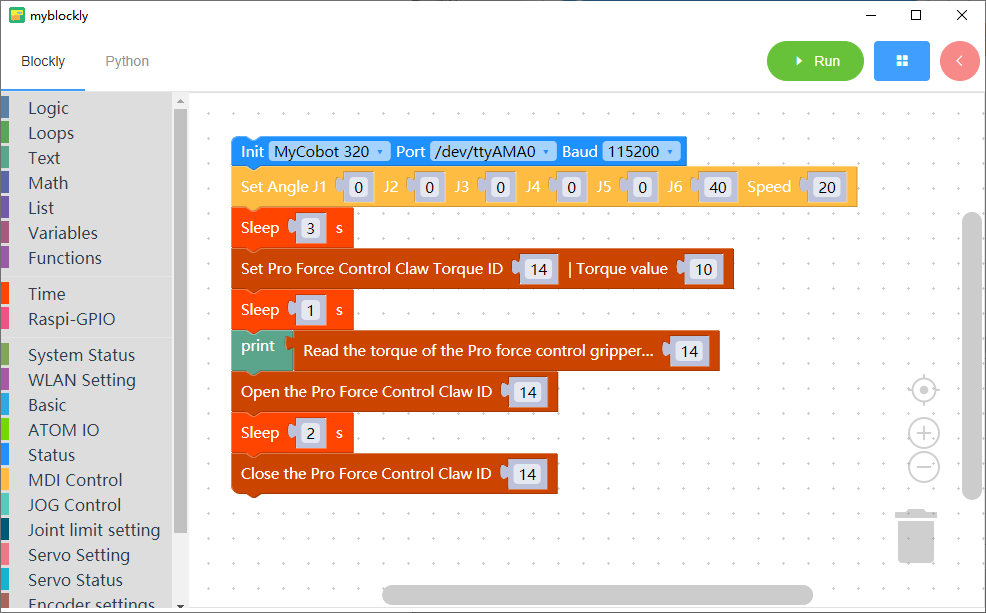
Implementation content:
The robot arm's joint 6 moves to 40 degrees at a speed of 20, and the rest of the joints move to 0 degrees. After three seconds,
Set the torque of the force-controlled gripper to 10. After one second,
The program running window will print out the current torque value of the force-controlled gripper, then open the gripper. After two seconds,
The gripper closes and the program ends.