Use of adaptive grippers
1 Slider control
Open a command line and run:
# If the end device is equipped with a Pro Adaptive Gripper, run (The default serial port name for the 2022 mycobot 320-M5 version is "/dev/ttyUSB0" and the baud rate is 115200. Some models have the serial port name "dev/ttyACM0". If the default serial port name is incorrect, you can change the serial port name to "/dev/ttyACM0":roslaunch new_mycobot_320 mycobot_320_gripper_slider.launch port:=/dev/ttyUSB0 baud:=115200If the Pro Adaptive Gripper is installed at the end, you will see the following interface:
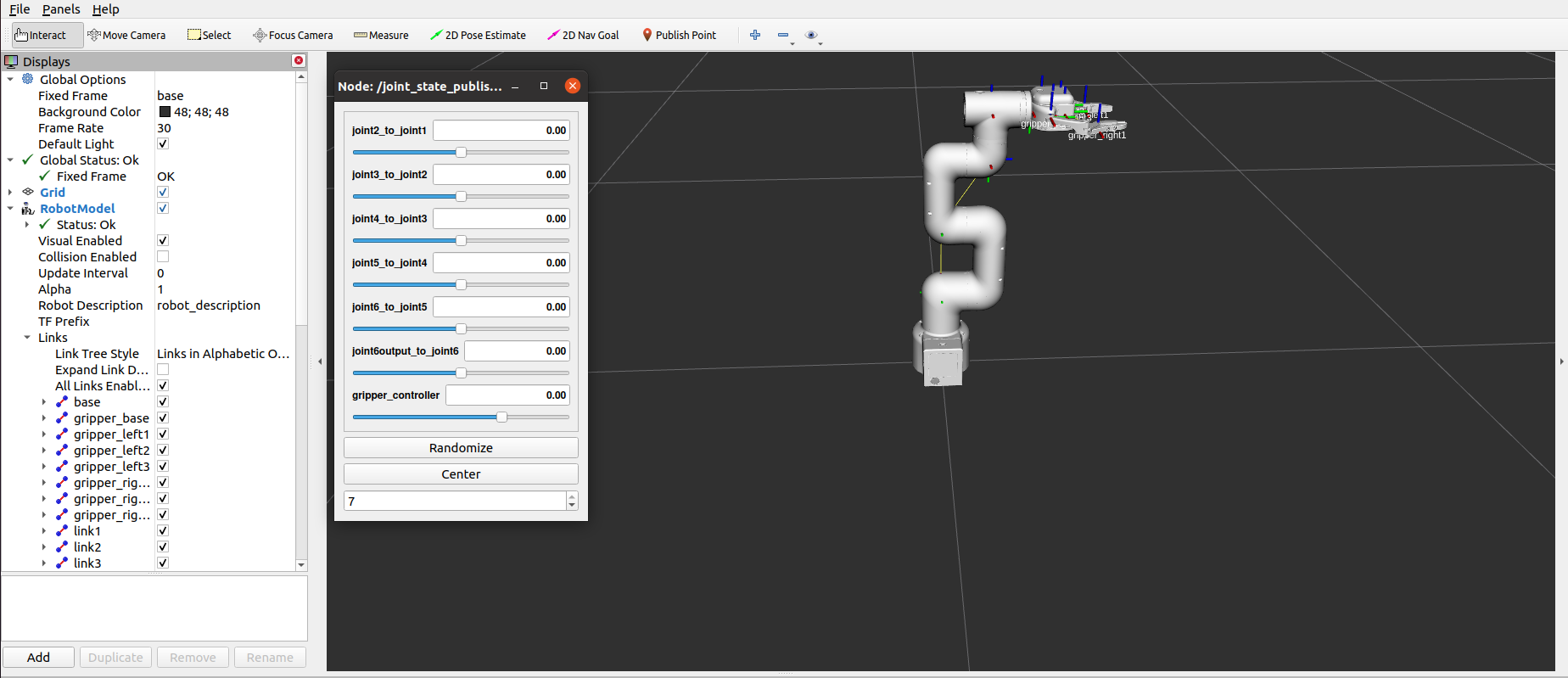
You can then control the model in rviz and move it by dragging the slider . If you want the real robot to move with the model, you need to open another command line and run:
# If the end device is equipped with a Pro Adaptive Gripper, run (The default serial port name for the 2022 mycobot 320-M5 version is "/dev/ttyUSB0" and the baud rate is 115200. Some models have the serial port name "dev/ttyACM0". If the default serial port name is incorrect, you can change the serial port name to "/dev/ttyACM0":rosrun new_mycobot_320 mycobot_320_gripper_slider.py _port:=/dev/ttyUSB0 _baud:=115200Please note: Since the robot will move to the current position of the model when the command is entered, please make sure that the model in rviz does not appear to be intersecting before you use the command. Do not drag the slider quickly after connecting the robot arm to prevent damage to the robot arm.
2 Use of moveit
mycobot_ros integrates MoveIt parts.
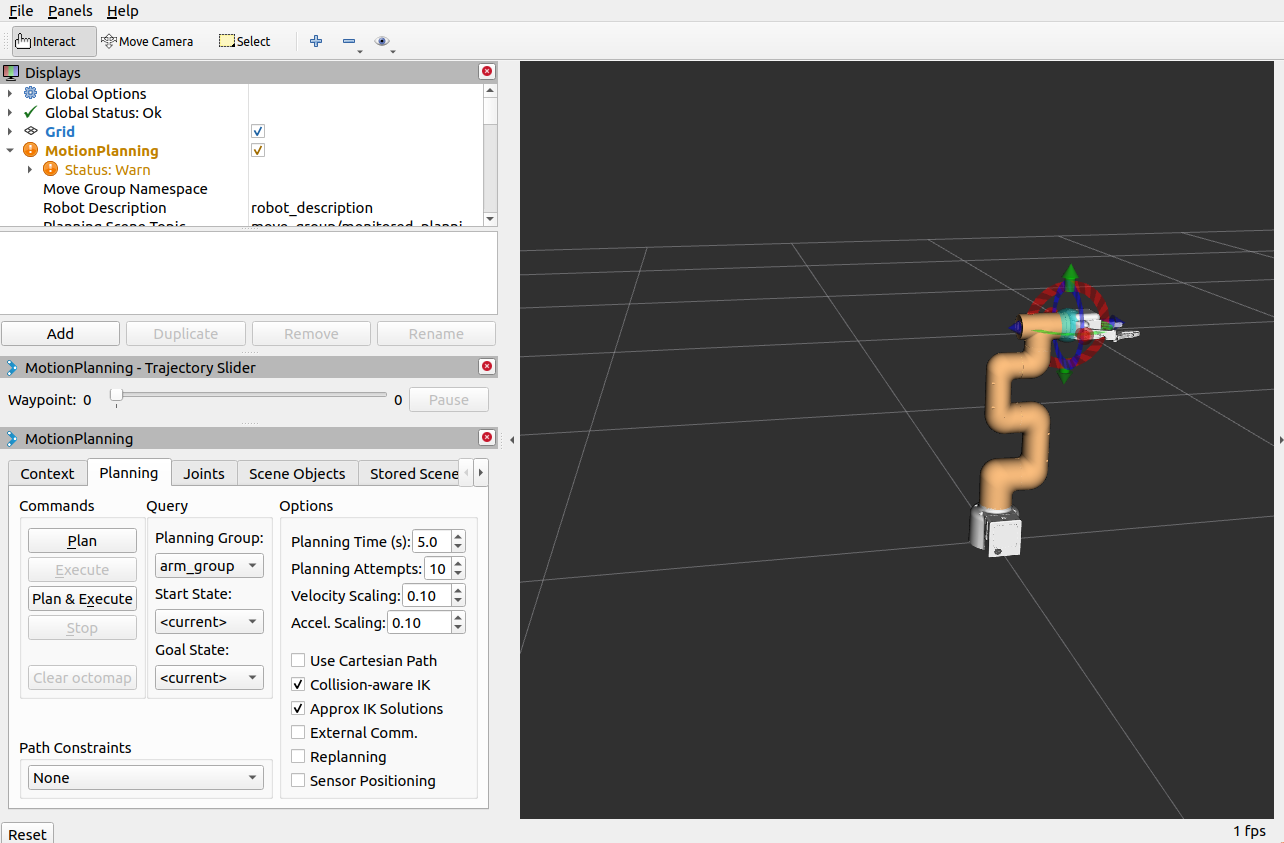
The operation results are as follows:
# If the end effector has a Pro Adaptive Gripper, run:roslaunch new_mycobot_320_gripper_moveit mycobot320_gripper_moveit.launchIf the Pro adaptive gripper is installed at the end, the operation effect is as follows:
If you want the real robot to execute the plan synchronously, you need to open another command line and run:
# If the end device is equipped with a Pro Adaptive Gripper, run (The default serial port name for the 2022 mycobot 320-M5 version is "/dev/ttyUSB0" and the baud rate is 115200. Some models have the serial port name "dev/ttyACM0". If the default serial port name is incorrect, you can change the serial port name to "/dev/ttyACM0":rosrun new_mycobot_320_gripper_moveit sync_plan.py _port:=/dev/ttyUSB0 _baud:=115200