6. Fingertip trajectory recognition
6.1. Introduction
MediaPipe is an open-source data stream processing machine learning application development framework developed by Google. It is a graph-based data processing pipeline used to build data sources in various forms, such as video, audio, sensor data, and any time series data.
MediaPipe is cross-platform and can run on embedded platforms (Raspberry Pi, etc.), mobile devices (iOS and Android), workstations and servers, and supports mobile GPU acceleration. MediaPipe provides cross-platform, customizable ML solutions for real-time and streaming media.
The core framework of MediaPipe is implemented in C++ and provides support for languages such as Java and Objective C. The main concepts of MediaPipe include packets, streams, calculators, graphs, and subgraphs.
Features of MediaPipe:
End-to-end acceleration: built-in fast ML inference and processing can be accelerated even on ordinary hardware.
Build once, deploy anywhere: unified solution for Android, iOS, desktop/cloud, web and IoT.
Ready-to-use solution: cutting-edge ML solution that demonstrates the full capabilities of the framework.
Free and open source: framework and solution under Apache2.0, fully extensible and customizable.
6.2, Startup
6.2.1, Program Description
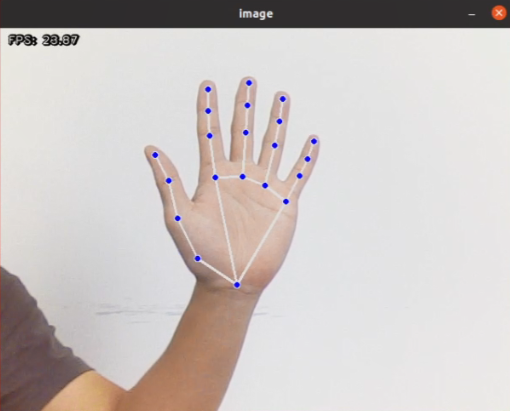
After the program is started, the camera captures the image, put the palm flat in the camera screen, open the fingers, and the palm faces the camera, similar to the gesture of the number 5, and the image will draw the joints on the entire palm. Adjust the position of your palm and try to position it at
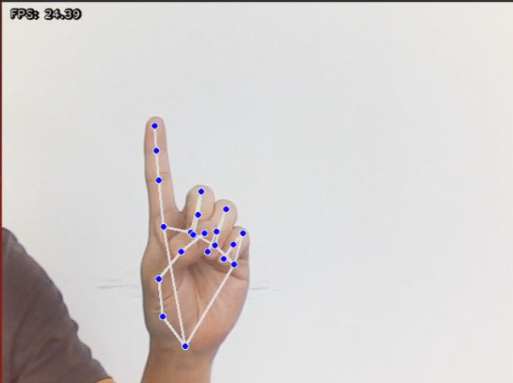
At this time, the index finger remains unchanged and the other fingers are retracted, similar to the gesture of the number 1.
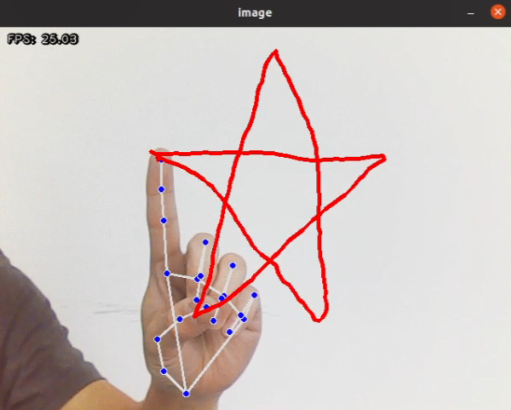
While keeping the gesture 1 unchanged, move the position of the finger, and a red line will appear on the screen to draw the path of the index finger.
When the figure is drawn, open all fingers, similar to the gesture of the number 5, and the drawn figure will be generated below.
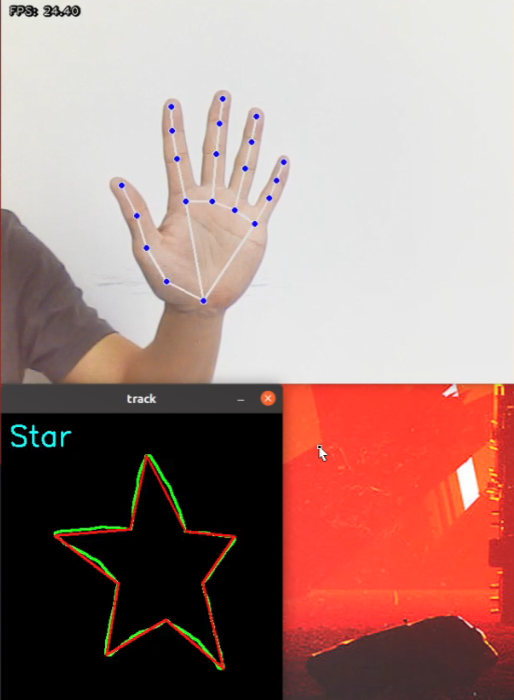
Note: The drawn graphics need to be closed, otherwise some content may be missing.
6.2.2, Program Startup
Enter the following command to start the program
xxxxxxxxxxros2 run jetcobot_mediapipe FingerTrajectory6.2.3, Source Code
Code path: ~/jetcobot_ws/src/jetcobot_mediapipe/jetcobot_mediapipe/FingerTrajectory.py
x#!/usr/bin/env python3# coding: utf8import osimport enumimport cv2import timeimport numpy as npimport mediapipe as mpimport rclpyfrom rclpy.node import Nodeimport queuefrom sensor_msgs.msg import Imagefrom jetcobot_mediapipe.fps import FPSimport gcfrom jetcobot_mediapipe.vutils import distance, vector_2d_angle, get_area_max_contourfrom cv_bridge import CvBridgefrom jetcobot_utils.grasp_controller import GraspController
def get_hand_landmarks(img, landmarks): """ 将landmarks从medipipe的归一化输出转为像素坐标 :param img: 像素坐标对应的图片 :param landmarks: 归一化的关键点 :return: """ h, w, _ = img.shape landmarks = [(lm.x * w, lm.y * h) for lm in landmarks] return np.array(landmarks)
def hand_angle(landmarks): """ 计算各个手指的弯曲角度 :param landmarks: 手部关键点 :return: 各个手指的角度 """ angle_list = [] # thumb 大拇指 angle_ = vector_2d_angle(landmarks[3] - landmarks[4], landmarks[0] - landmarks[2]) angle_list.append(angle_) # index 食指 angle_ = vector_2d_angle(landmarks[0] - landmarks[6], landmarks[7] - landmarks[8]) angle_list.append(angle_) # middle 中指 angle_ = vector_2d_angle(landmarks[0] - landmarks[10], landmarks[11] - landmarks[12]) angle_list.append(angle_) # ring 无名指 angle_ = vector_2d_angle(landmarks[0] - landmarks[14], landmarks[15] - landmarks[16]) angle_list.append(angle_) # pink 小拇指 angle_ = vector_2d_angle(landmarks[0] - landmarks[18], landmarks[19] - landmarks[20]) angle_list.append(angle_) angle_list = [abs(a) for a in angle_list] return angle_list
def h_gesture(angle_list): """ 通过二维特征确定手指所摆出的手势 :param angle_list: 各个手指弯曲的角度 :return : 手势名称字符串 """ thr_angle, thr_angle_thumb, thr_angle_s = 65.0, 53.0, 49.0 if (angle_list[0] < thr_angle_s) and (angle_list[1] < thr_angle_s) and (angle_list[2] < thr_angle_s) and ( angle_list[3] < thr_angle_s) and (angle_list[4] < thr_angle_s): gesture_str = "five" elif (angle_list[0] > 5) and (angle_list[1] < thr_angle_s) and (angle_list[2] > thr_angle) and ( angle_list[3] > thr_angle) and (angle_list[4] > thr_angle): gesture_str = "one" else: gesture_str = "none" return gesture_str
class State(enum.Enum): NULL = 0 TRACKING = 1 RUNNING = 2
def draw_points(img, points, tickness=4, color=(255, 0, 0)): """ 将记录的点连线画在画面上 """ points = np.array(points).astype(dtype=np.int32) if len(points) > 2: for i, p in enumerate(points): if i + 1 >= len(points): break cv2.line(img, tuple(p), tuple(points[i + 1]), color, tickness)
def get_track_img(points): """ 用记录的点生成一张黑底白线的轨迹图 """ points = np.array(points).astype(dtype=np.int32) x_min, y_min = np.min(points, axis=0).tolist() x_max, y_max = np.max(points, axis=0).tolist() track_img = np.full([y_max - y_min + 100, x_max - x_min + 100, 1], 0, dtype=np.uint8) points = points - [x_min, y_min] points = points + [50, 50] draw_points(track_img, points, 1, (255, 255, 255)) return track_img
class FingerTrajectoryNode(Node): def __init__(self): super().__init__('finger_trajectory') self.graspController = GraspController() self.graspController.init_pose2() self.drawing = mp.solutions.drawing_utils self.timer = time.time()
self.hand_detector = mp.solutions.hands.Hands( static_image_mode=False, max_num_hands=1, min_tracking_confidence=0.05, min_detection_confidence=0.6 )
self.fps = FPS() # fps计算器 self.state = State.NULL self.points = [] self.start_count = 0 self.no_finger_timestamp = time.time()
self.gc_stamp = time.time() self.image_queue = queue.Queue(maxsize=1) self.bridge = CvBridge() # Initialize video capture device self.cap = cv2.VideoCapture(0, cv2.CAP_V4L2) self.cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640) self.cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480) if not self.cap.isOpened(): self.get_logger().error("Error: Could not open video device.") rclpy.shutdown()
def image_proc(self): ret, frame = self.cap.read() if not ret: self.get_logger().error("Error: Could not read frame from video device.") return
rgb_image = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) rgb_image = cv2.flip(rgb_image, 1) # 水平翻转 result_image = np.copy(rgb_image) result_call = None if self.timer <= time.time() and self.state == State.RUNNING: self.state = State.NULL try: results = self.hand_detector.process(rgb_image) if self.state != State.RUNNING else None if results is not None and results.multi_hand_landmarks: gesture = "none" index_finger_tip = [0, 0] self.no_finger_timestamp = time.time() # 记下当期时间,以便超时处理 for hand_landmarks in results.multi_hand_landmarks: self.drawing.draw_landmarks( result_image, hand_landmarks, mp.solutions.hands.HAND_CONNECTIONS) landmarks = get_hand_landmarks(rgb_image, hand_landmarks.landmark) angle_list = (hand_angle(landmarks)) gesture = (h_gesture(angle_list)) index_finger_tip = landmarks[8].tolist()
if self.state == State.NULL: if gesture == "one": # 检测到单独伸出食指,其他手指握拳 self.start_count += 1 if self.start_count > 20: self.state = State.TRACKING self.points = [] else: self.start_count = 0
elif self.state == State.TRACKING: if gesture == "five": # 伸开五指结束画图 self.state = State.NULL
# 生成黑白轨迹图 track_img = get_track_img(self.points) contours = cv2.findContours(track_img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] contour = get_area_max_contour(contours, 300) contour = contour[0] # 按轨迹图识别所画图形 # cv2.fillPoly在图像上绘制并填充多边形 track_img = cv2.fillPoly(track_img, [contour,], (255, 255, 255)) for _ in range(3): # 腐蚀函数 track_img = cv2.erode(track_img, cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))) # 膨胀函数 track_img = cv2.dilate(track_img, cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))) contours = cv2.findContours(track_img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] contour = get_area_max_contour(contours, 300) contour = contour[0] h, w = track_img.shape[:2]
track_img = np.full([h, w, 3], 0, dtype=np.uint8) track_img = cv2.drawContours(track_img, [contour, ], -1, (0, 255, 0), 2) # 对图像轮廓点进行多边形拟合 approx = cv2.approxPolyDP(contour, 0.026 * cv2.arcLength(contour, True), True) track_img = cv2.drawContours(track_img, [approx, ], -1, (0, 0, 255), 2)
print(len(approx)) # 根据轮廓包络的顶点数确定图形 if len(approx) == 3: cv2.putText(track_img, 'Triangle', (10, 40),cv2.FONT_HERSHEY_SIMPLEX, 1.2, (255, 255, 0), 2) if len(approx) == 4 or len(approx) == 5: cv2.putText(track_img, 'Square', (10, 40),cv2.FONT_HERSHEY_SIMPLEX, 1.2, (255, 255, 0), 2) if 5 < len(approx) < 10: cv2.putText(track_img, 'Circle', (10, 40),cv2.FONT_HERSHEY_SIMPLEX, 1.2, (255, 255, 0), 2) if len(approx) == 10: cv2.putText(track_img, 'Star', (10, 40),cv2.FONT_HERSHEY_SIMPLEX, 1.2, (255, 255, 0), 2)
cv2.imshow('track', track_img)
else: if len(self.points) > 0: if distance(self.points[-1], index_finger_tip) > 5: self.points.append(index_finger_tip) else: self.points.append(index_finger_tip)
draw_points(result_image, self.points) else: pass else: if self.state == State.TRACKING: if time.time() - self.no_finger_timestamp > 2: self.state = State.NULL self.points = []
except BaseException as e: self.get_logger().error("e = {}".format(e))
self.fps.update() self.fps.show_fps(result_image) result_image = cv2.cvtColor(result_image, cv2.COLOR_RGB2BGR) cv2.imshow('image', result_image) key = cv2.waitKey(1)
if key == ord(' '): # 按空格清空已经记录的轨迹 self.points = [] if time.time() > self.gc_stamp: self.gc_stamp = time.time() + 1 gc.collect()
def main(args=None): rclpy.init(args=args) finger_track_node = FingerTrajectoryNode() try: while rclpy.ok(): finger_track_node.image_proc() except KeyboardInterrupt: pass finally: finger_track_node.cap.release() cv2.destroyAllWindows() rclpy.shutdown()
if __name__ == "__main__": main()