Camera display
Camera displayIntroduction to the results of routine experimentsCode ExplanationComplete codeCamera related APIConstructor2.1 sensor.reset2.2 sensor.set_framesize2.3 sensor.set_pixformat2.4 sensor.set_hmirror2.5 sensor.set_vflip2.6 sensor.run2.7 sensor.stop2.8 sensor.snapshot
Introduction to the results of routine experiments
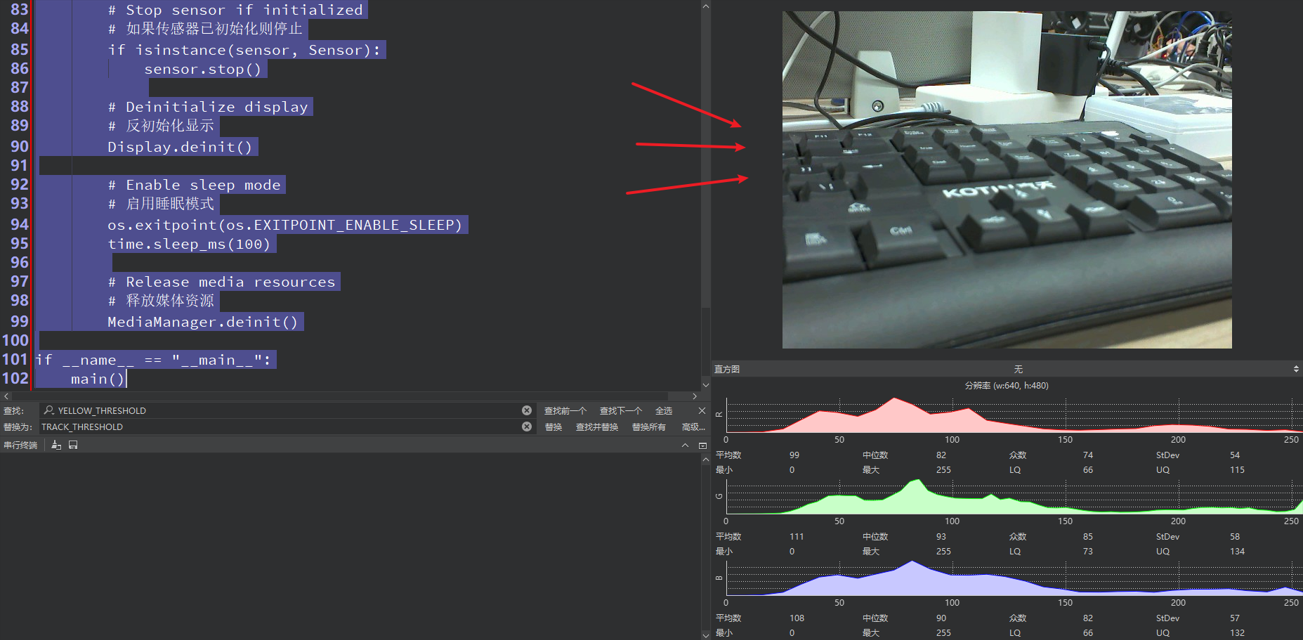
In this section, we will call the camera and display the image captured by the camera in the IDE frame buffer.
We use CanMV IDE to open the sample code and connect K230 to the computer via USB.
Click the Run button in the lower left corner of the CanMV IDE, and you can see the image captured by the camera displayed in the frame buffer in the upper right corner of the IDE.
Code Explanation
The source code file for this tutorial is located in [Source Code/02.Basic/17.sensor.py]
Complete code
xxxxxxxxxx# 导入必要的模块:时间、数学、操作系统、垃圾回收、系统# (Import necessary modules: time, math, os, garbage collection, system)import time, math, os, gc, sys# 导入媒体相关模块:传感器、显示、媒体管理# (Import media-related modules: sensor, display, media manager)from media.sensor import *from media.display import *from media.media import *# 定义图像宽度和高度常量# (Define image width and height constants)WIDTH = 640HEIGHT = 480# 初始化传感器变量为空# (Initialize sensor variable as None)sensor = Nonetry: # 使用默认配置构造传感器对象,设置指定宽度和高度 # (Construct a Sensor object with default configuration, setting specified width and height) sensor = Sensor(width = WIDTH, height = HEIGHT, fps=30) # 传感器复位 # (Reset the sensor) sensor.reset() # 设置水平镜像(当前被注释) # (Set horizontal mirror - currently commented out) # sensor.set_hmirror(False) # 设置垂直翻转(当前被注释) # (Set vertical flip - currently commented out) # sensor.set_vflip(False) # 设置通道0的输出尺寸 # (Set channel 0 output size) sensor.set_framesize(width = WIDTH, height = HEIGHT) # 设置通道0的输出格式为RGB565 # (Set channel 0 output format to RGB565) sensor.set_pixformat(Sensor.RGB565) # 使用IDE作为输出目标初始化显示 # (Initialize display using IDE as output target) Display.init(Display.ST7701, width = WIDTH, height = HEIGHT, to_ide = True) # 初始化媒体管理器 # (Initialize the media manager) MediaManager.init() # 启动传感器运行 # (Start the sensor running) sensor.run() # 创建时钟对象用于计算帧率 # (Create a clock object to calculate frames per second) fps = time.clock() # 主循环 # (Main loop) while True: # 帧率计时器tick # (Tick the FPS timer) fps.tick() # 检查是否应该退出程序 # (Check if the program should exit) os.exitpoint() # 从传感器获取一帧图像 # (Capture a frame from the sensor) img = sensor.snapshot() # 在屏幕上显示结果图像 # (Display the resulting image on screen) Display.show_image(img) # 执行垃圾回收 # (Perform garbage collection) gc.collect() # 打印当前帧率 # (Print the current frames per second) print(fps.fps()) except KeyboardInterrupt as e: # 捕获键盘中断异常(用户手动停止) # (Catch keyboard interrupt exception - user manually stops) print(f"user stop")except BaseException as e: # 捕获所有其他异常 # (Catch all other exceptions) print(f"Exception '{e}'")finally: # 无论如何都执行清理工作 # (Perform cleanup regardless of how the program exits) # 停止传感器运行(如果传感器对象存在) # (Stop the sensor if the sensor object exists) if isinstance(sensor, Sensor): sensor.stop() # 反初始化显示 # (Deinitialize the display) Display.deinit() # 设置退出点,允许进入睡眠模式 # (Set exit point to enable sleep mode) os.exitpoint(os.EXITPOINT_ENABLE_SLEEP) # 短暂延时100毫秒 # (Brief delay of 100 milliseconds) time.sleep_ms(100) # 释放媒体缓冲区 # (Release media buffer) MediaManager.deinit()Camera related API
The following content is excerpted from the CanMV Sensor API chapter
The module of the CanMV K230 platform sensoris responsible for image acquisition and data processing. The module provides a set of high-level APIs that developers can use to easily obtain images of different formats and sizes without having to understand the specific implementation of the underlying hardware.
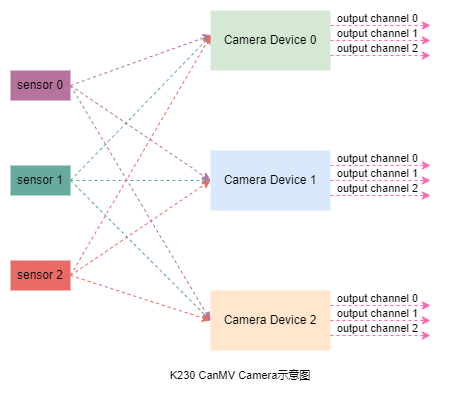
Sensor 0, sensor 1, and sensor 2 represent three image input sensor devices; Camera Device 0, Camera Device 1, and Camera Device 2 correspond to the corresponding image processing units; output channel 0, output channel 1, and output channel 2 indicate that each image processing unit supports up to three output channels. Through software configuration, different sensor devices can be flexibly mapped to the corresponding image processing units.
The module of CanMV K230 sensorsupports the simultaneous access of up to three image sensors, each of which can independently complete the acquisition, capture and processing of image data. In addition, each video channel can output three channels of image data in parallel for further processing by the back-end module. In actual applications, the specific number of sensors supported, input resolution and number of output channels will be limited by the hardware configuration and memory size of the development board, so a comprehensive evaluation is required based on project requirements.
Constructor
describe
csi idConstruct an object from a and an image sensor type Sensor.
In image processing applications, users usually need to create an Sensorobject first. CanMV K230 software can automatically detect the built-in image sensor, without the user manually specifying the specific model, just set the maximum output resolution and frame rate of the sensor. For information about supported image sensors, see the image sensor support list . If the set resolution or frame rate does not match the default configuration of the current sensor, the system will automatically adjust to the optimal configuration. The final configuration can be viewed in the log, for example use sensor 23, output 640x480@90.
grammar
xxxxxxxxxxsensor = Sensor(id, [width, height, fps])
parameter
| Parameter name | describe | Input/Output | illustrate |
|---|---|---|---|
| id | csiPort, support 0-2, please refer to the hardware schematic diagram for specific ports | enter | Optional. The default value is different for different development boards. |
| width | sensorMaximum output image width | enter | Optional, default1920 |
| height | sensorMaximum output image height | enter | Optional, default1080 |
| fps | sensorMaximum output image frame rate | enter | Optional, default30 |
Return Value
| Return Value | describe |
|---|---|
| Sensor Object | Sensor Object |
Example
xxxxxxxxxxsensor = Sensor(id=0)sensor = Sensor(id=0, width=1280, height=720, fps=60)sensor = Sensor(id=0, width=640, height=480)
2.1 sensor.reset
describe
Resets sensorthe object. SensorYou must call this function after constructing the object to continue executing other operations.
grammar
xxxxxxxxxxsensor.reset()
parameter
| Parameter name | describe | Input/Output |
|---|---|---|
| none |
Return Value
| Return Value | describe |
|---|---|
| none |
Example
# Initialize sensor device 0 and sensor OV5647sensor.reset()
2.2 sensor.set_framesize
describe
Sets the output image size for the specified channel. The user can configure the output image size via framesizethe parameter or by specifying widthand directly. The width is automatically aligned to 16 pixels wide .height
grammar
xxxxxxxxxxsensor.set_framesize(framesize=FRAME_SIZE_INVALID, chn=CAM_CHN_ID_0, alignment=0, **kwargs)
parameter
| Parameter name | describe | Input/Output |
|---|---|---|
| framesize | Sensor output image size | enter |
| chn | Sensor output channel number | enter |
| width | Output image width, kw_arg | enter |
| height | Output image height, kw_arg | enter |
Return Value
| Return Value | describe |
|---|---|
| none |
Precautions
- The output image size must not exceed the actual output capability of the image sensor.
- The maximum output image size for each channel is limited by the hardware.
Example
xxxxxxxxxx# Configure sensor device 0, output channel 0, output image size 640x480sensor.set_framesize(chn=CAM_CHN_ID_0, width=640, height=480)# Configure sensor device 0, output channel 1, output image size 320x240sensor.set_framesize(chn=CAM_CHN_ID_1, width=320, height=240)
2.3 sensor.set_pixformat
describe
Configure the image sensor output image format for the specified channel.
grammar
xxxxxxxxxxsensor.set_pixformat(pix_format, chn=CAM_CHN_ID_0)
parameter
| Parameter name | describe | Input/Output |
|---|---|---|
| pix_format | Output image format | enter |
| chn | Sensor output channel number | enter |
Return Value
| Return Value | describe |
|---|---|
| none |
Example
# Configure sensor device 0, output channel 0, output NV12 formatsensor.set_pixformat(sensor.YUV420SP, chn=CAM_CHN_ID_0)# Configure sensor device 0, output channel 1, output RGB888 formatsensor.set_pixformat(sensor.RGB888, chn=CAM_CHN_ID_1)
2.4 sensor.set_hmirror
describe
Configure whether the image sensor is horizontally mirrored.
grammar
xxxxxxxxxxsensor.set_hmirror(enable)
parameter
| Parameter name | describe | Input/Output |
|---|---|---|
| enable | TrueEnable horizontal mirror function FalseDisable horizontal mirror function | enter |
Return Value
| Return Value | describe |
|---|---|
| none |
Example
xxxxxxxxxxsensor.set_hmirror(True)
2.5 sensor.set_vflip
describe
Configure whether the image sensor is flipped vertically.
grammar
xxxxxxxxxxsensor.set_vflip(enable)
parameter
| Parameter name | describe | Input/Output |
|---|---|---|
| enable | TrueTurn on the vertical flip function FalseTurn off the vertical flip function | enter |
Return Value
| Return Value | describe |
|---|---|
| none |
Example
xxxxxxxxxxsensor.set_vflip(True)
2.6 sensor.run
describe
Enables output of the image sensor. This must be done before calling .MediaManager.init()
grammar
xxxxxxxxxxsensor.run()
Return Value
| Return Value | describe |
|---|---|
| none |
Precautions
- When multiple sensors (up to 3) are used simultaneously, only one of them
runneeds to be executed.
Example
# Start the sensor device output data streamsensor.run()
2.7 sensor.stop
describe
Stops image sensor output. This method must be called before .MediaManager.deinit()
grammar
xxxxxxxxxxsensor.stop()
Return Value
| Return Value | describe |
|---|---|
| none |
Precautions
- If multiple image sensors are used simultaneously (maximum 3), each sensor must be called separately
stop.
Example
# Stop the data stream output of sensor device 0sensor.stop()
2.8 sensor.snapshot
describe
Capture a frame of image data from the specified output channel.
grammar
xxxxxxxxxxsensor.snapshot(chn=CAM_CHN_ID_0)
parameter
| Parameter name | describe | Input/Output |
|---|---|---|
| chn | Sensor output channel number | enter |
Return Value
| Return Value | describe |
|---|---|
| image object | Captured image data |
| other | Capture failed |
Example
xxxxxxxxxx# Capture a frame of image data from channel 0 of sensor device 0sensor.snapshot()