Face Detection
Face DetectionRoutine Experiment EffectCode ExplanationCode structureImport related dependency classesCustom face detection classPerforming face detectionA brief introduction to face detection algorithmsCommon application scenariosAlgorithm Overview
Routine Experiment Effect
In this section, we will learn how to use K230 to implement face detection.
The code in this section is in [Source code/07.Face/01.face_detection.py]
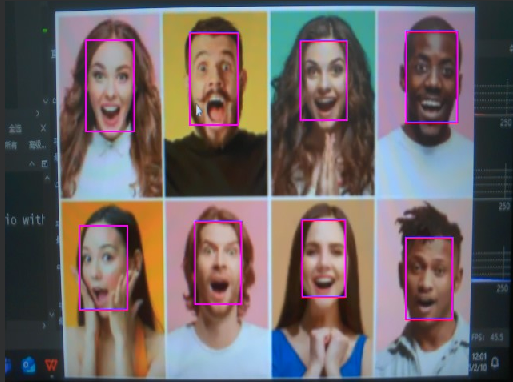
After connecting to the IDE, run the example code in this section and aim the K230 at the face. You can see that the positions of all faces are framed in the middle of the screen.
Serial port output function has been added
After detecting a face, the following serial output will be sent
$x,y,w,h#
The '$' represents the beginning of the data, and the '#' represents the end of the data.
x, y, w, h are the positions of the face detection frame (resolution is 640*480)
Code Explanation
Code structure
Import related dependency classes
xxxxxxxxxxfrom libs.PipeLine import PipeLine, ScopedTiming# Pipeline是集成了摄像头、LCD屏幕显示等多媒体功能的模块,大大简化了调用摄像头和显示相关的操作# Pipeline is a module that integrates multimedia functions like camera and LCD display, greatly simplifying camera and display operations# ScopedTiming是一个代码执行计时器,使用方法可以参考例程代码# ScopedTiming is a code execution timer, refer to example code for usagefrom libs.AIBase import AIBasefrom libs.AI2D import Ai2d# AIBase和AI2D用来处理AI底层的逻辑# AIBase is the base class for all AI functionality implementations# AI2D用于处理图像# AI2D is used for image processingimport osimport ujson# os和ujson分别提供系统相关操作和JSON数据相关操作,不是每个例程都能用上# os and ujson provide system operations and JSON data operations respectively, not required for every examplefrom media.media import *from time import *import nncase_runtime as nn# nncase是K230进行AI推理的核心模块,提供了便捷的方法供用户调用K230的KPU# nncase is the core module for AI inference on K230, providing convenient methods for users to call K230's KPUimport ulab.numpy as np# ulab.numpy是从python的numpy中移植而来,用于进行一些AI运算中必要的矩阵操作# ulab.numpy is ported from Python's numpy, used for necessary matrix operations in AI computationsimport timeimport utimeimport imageimport randomimport gcimport sysimport aidemo# aidemo也是核心模块之一,K230固件中预制了非常多的AI玩法# aidemo is another core module, K230 firmware includes many pre-configured AI applications# 通过aidemo模块可以快速简单的调用这些玩法中的复杂方法# Complex methods in these applications can be easily called through the aidemo moduleimport _thread# _thread是线程模块,前面章节中我们有做过详细讲解,这里就不再赘述# _thread is the threading module, as detailed in previous chapters, no need to elaborate further
Custom face detection class
xxxxxxxxxx# 自定义人脸检测类,继承自AIBase基类class FaceDetectionApp(AIBase): def __init__(self, kmodel_path, model_input_size, anchors, confidence_threshold=0.5, nms_threshold=0.2, rgb888p_size=[224,224], display_size=[1920,1080], debug_mode=0): # 调用基类的构造函数 / Call parent class constructor super().__init__(kmodel_path, model_input_size, rgb888p_size, debug_mode) # 模型文件路径 / Path to the model file self.kmodel_path = kmodel_path # 模型输入分辨率 / Model input resolution self.model_input_size = model_input_size # 置信度阈值:检测结果的最小置信度要求 / Confidence threshold: minimum confidence requirement for detection results self.confidence_threshold = confidence_threshold # NMS阈值:非极大值抑制的阈值 / NMS threshold: threshold for Non-Maximum Suppression self.nms_threshold = nms_threshold # 锚点数据:用于目标检测的预定义框 / Anchor data: predefined boxes for object detection self.anchors = anchors # sensor给到AI的图像分辨率,宽度16对齐 / Image resolution from sensor to AI, width aligned to 16 self.rgb888p_size = [ALIGN_UP(rgb888p_size[0], 16), rgb888p_size[1]] # 显示分辨率,宽度16对齐 / Display resolution, width aligned to 16 self.display_size = [ALIGN_UP(display_size[0], 16), display_size[1]] # 调试模式标志 / Debug mode flag self.debug_mode = debug_mode # 实例化AI2D对象用于图像预处理 / Initialize AI2D object for image preprocessing self.ai2d = Ai2d(debug_mode) # 设置AI2D的输入输出格式 / Set AI2D input/output format self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT, nn.ai2d_format.NCHW_FMT, np.uint8, np.uint8) def config_preprocess(self, input_image_size=None): with ScopedTiming("set preprocess config", self.debug_mode > 0): # 获取AI2D输入尺寸 / Get AI2D input size ai2d_input_size = input_image_size if input_image_size else self.rgb888p_size # 获取padding参数 / Get padding parameters top, bottom, left, right = self.get_padding_param() # 设置padding: [上,下,左,右], 填充值[104,117,123] / Set padding: [top,bottom,left,right], padding value[104,117,123] self.ai2d.pad([0, 0, 0, 0, top, bottom, left, right], 0, [104, 117, 123]) # 设置resize方法:双线性插值 / Set resize method: bilinear interpolation self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel) # 构建预处理流程 / Build preprocessing pipeline self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]], [1,3,self.model_input_size[1],self.model_input_size[0]]) def postprocess(self, results): with ScopedTiming("postprocess", self.debug_mode > 0): # 调用aidemo库进行人脸检测后处理 / Call aidemo library for face detection post-processing post_ret = aidemo.face_det_post_process(self.confidence_threshold, self.nms_threshold, self.model_input_size[1], self.anchors, self.rgb888p_size, results) return post_ret[0] if post_ret else post_ret def draw_result(self, pl, dets): with ScopedTiming("display_draw", self.debug_mode > 0): if dets: # 清除上一帧的OSD绘制 / Clear previous frame's OSD drawing pl.osd_img.clear() for det in dets: # 转换检测框坐标到显示分辨率 / Convert detection box coordinates to display resolution x, y, w, h = map(lambda x: int(round(x, 0)), det[:4]) x = x * self.display_size[0] // self.rgb888p_size[0] y = y * self.display_size[1] // self.rgb888p_size[1] w = w * self.display_size[0] // self.rgb888p_size[0] h = h * self.display_size[1] // self.rgb888p_size[1] # 绘制黄色检测框 / Draw yellow detection box pl.osd_img.draw_rectangle(x, y, w, h, color=(255, 255, 0, 255), thickness=2) else: pl.osd_img.clear() def get_padding_param(self): # 计算模型输入和实际图像的缩放比例 / Calculate scaling ratio between model input and actual image dst_w = self.model_input_size[0] dst_h = self.model_input_size[1] ratio_w = dst_w / self.rgb888p_size[0] ratio_h = dst_h / self.rgb888p_size[1] ratio = min(ratio_w, ratio_h) # 计算缩放后的新尺寸 / Calculate new dimensions after scaling new_w = int(ratio * self.rgb888p_size[0]) new_h = int(ratio * self.rgb888p_size[1]) # 计算padding值 / Calculate padding values dw = (dst_w - new_w) / 2 dh = (dst_h - new_h) / 2 # 返回padding参数 / Return padding parameters return (int(round(0)), int(round(dh * 2 + 0.1)), int(round(0)), int(round(dw * 2 - 0.1)))
Performing face detection
xxxxxxxxxxdef exce_demo(pl): # 声明全局变量face_det / Declare global variable face_det global face_det # 获取显示相关参数 / Get display-related parameters display_mode = pl.display_mode # 显示模式(如lcd) / Display mode (e.g., lcd) rgb888p_size = pl.rgb888p_size # 原始图像分辨率 / Original image resolution display_size = pl.display_size # 显示分辨率 / Display resolution # 设置人脸检测模型路径 / Set face detection model path kmodel_path = "/sdcard/kmodel/face_detection_320.kmodel" # 设置模型参数 / Set model parameters confidence_threshold = 0.5 # 置信度阈值 / Confidence threshold nms_threshold = 0.2 # 非极大值抑制阈值 / Non-maximum suppression threshold anchor_len = 4200 # 锚框数量 / Number of anchor boxes det_dim = 4 # 检测维度(x,y,w,h) / Detection dimensions (x,y,w,h) # 加载锚框数据 / Load anchor box data anchors_path = "/sdcard/utils/prior_data_320.bin" anchors = np.fromfile(anchors_path, dtype=np.float) anchors = anchors.reshape((anchor_len, det_dim)) try: # 初始化人脸检测应用实例 / Initialize face detection application instance face_det = FaceDetectionApp(kmodel_path, model_input_size=[320, 320], anchors=anchors, confidence_threshold=confidence_threshold, nms_threshold=nms_threshold, rgb888p_size=rgb888p_size, display_size=display_size, debug_mode=0) # 配置图像预处理 / Configure image preprocessing face_det.config_preprocess() # 主循环 / Main loop while True: with ScopedTiming("total",0): # 计时器 / Timer img = pl.get_frame() # 获取摄像头帧图像 / Get camera frame res = face_det.run(img) # 执行人脸检测 / Run face detection face_det.draw_result(pl, res) # 绘制检测结果 / Draw detection results pl.show_image() # 显示处理后的图像 / Display processed image gc.collect() # 垃圾回收 / Garbage collection time.sleep_us(10) # 短暂延时 / Brief delay except Exception as e: print("人脸检测功能退出") # 异常退出提示 / Exception exit prompt finally: face_det.deinit() # 释放资源 / Release resources
A brief introduction to face detection algorithms
Common application scenarios
Face detection is also the basis for subsequent face recognition, face key point recognition and other functions.
Camera App
- Autofocus function
- Framing assistance
- People Counting
Image Processing
- Beauty and skin resurfacing positioning
- Sticker special effects position determination
- Background blur range definition
- Photo cropping suggestions
Statistical analysis
- Crowd density detection
- Regional population statistics
- Crowd distribution heat map
- Queue length monitoring
Camera Control
- Automatic zoom following
- Automatic adjustment of the framing range
- Automatically frame the video conference screen
Algorithm Overview
Common face detection algorithms can be roughly classified into the following two types:
Viola-Jones algorithm (classic method)
- Face pattern recognition using Haar features
- Using integral graph to accelerate feature calculation
- Building a strong classifier using AdaBoost
- Using cascade classifiers to improve efficiency
Deep learning based methods
- CNN convolutional neural network extracts features
- Multi-scale detection to handle faces of different sizes
- Anchor box predicts the face position
- Confidence score determines whether it is a face
In the example, we use a method based on deep learning. We first use a pre-trained deep learning model (.kmodel file), and then set 4200 anchor boxes in the code to predict the face position.
In the post-processing step, we filter the detection results using a confidence threshold (confidence_threshold) and then use non-maximum suppression (NMS) to eliminate overlapping boxes.
The example code is optimized for the Yabo Intelligent K230 hardware platform and uses the nncase runtime library to run the deep learning model.