Use lidar in ROS2
1、Compile function package
Extract oradar_ lidar_ Oradar from ros2.zip_ Lidar, put oradar_ Lidar is copied to the src directory of the created workspace, where the workspace name is oradar_ Ws as an example, oradar_ The path of ws is in the~directory, and then returns to the workspace directory.
Input following command to complie.
cd ~/oradar_wscolcon build --symlink-install
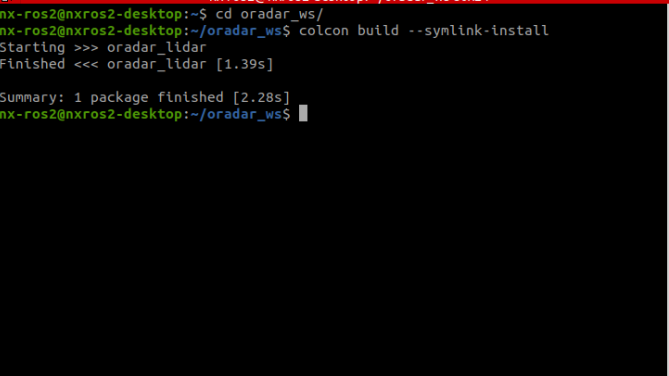
The above picture shows that the compilation has passed.
Then enter the following command to set the environment variable.
xxxxxxxxxxsource install/setup.bash
2、Run launch
Before operation, you need to refer to the first section and bind the following radar port names.
For details, refer to the section "1. Preparation before use - Bind radar port names". After binding the radar, enter the following command to start the lidar.
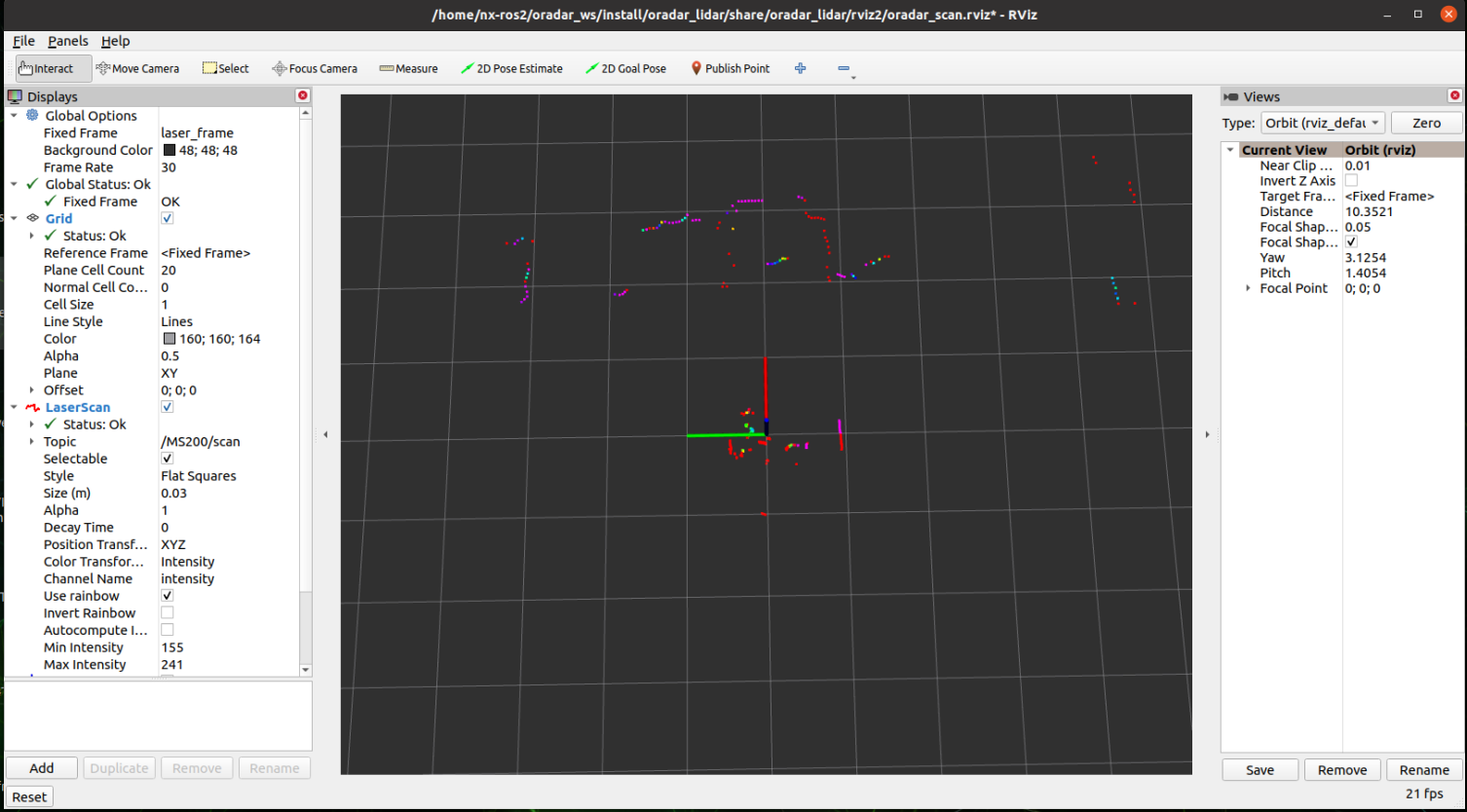
xxxxxxxxxxros2 launch oradar_lidar ms200_scan_view.launch.py
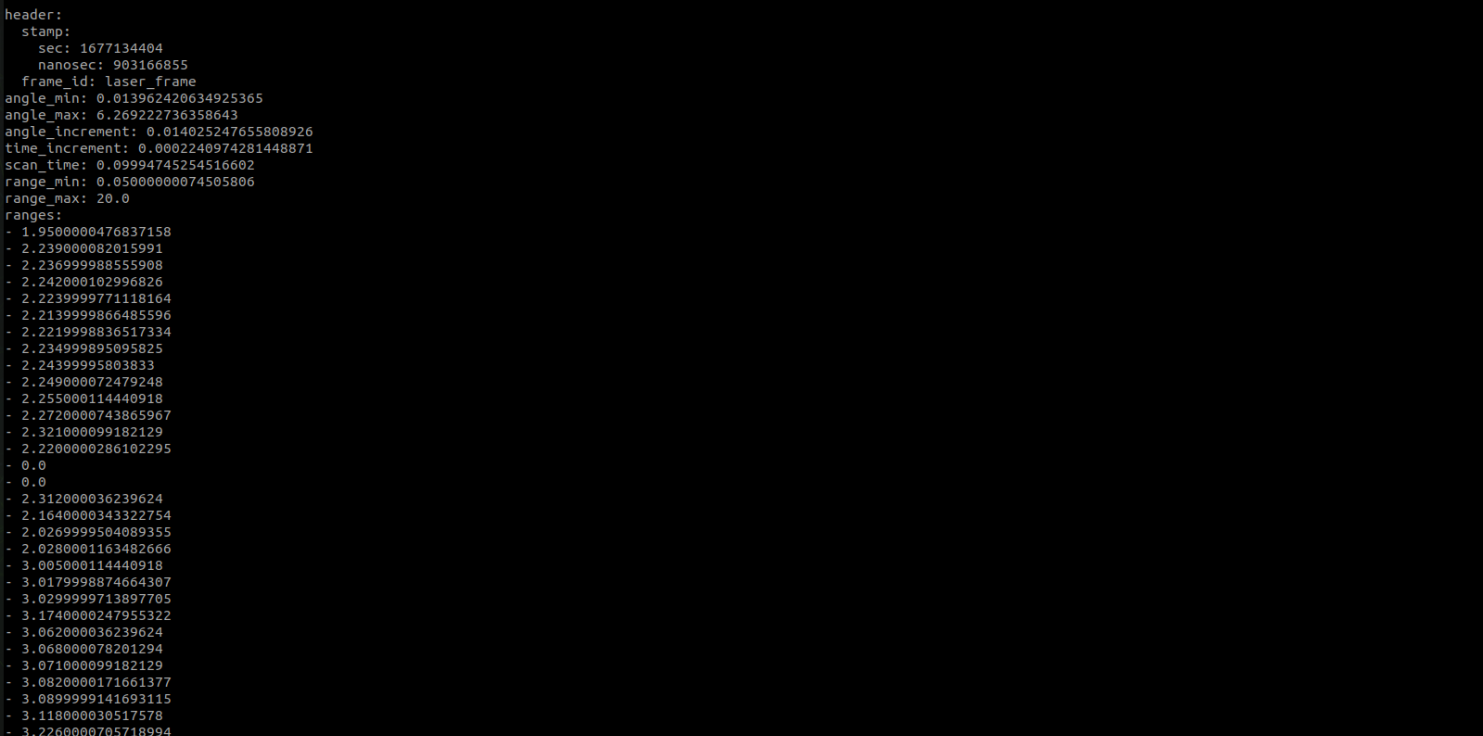
You can view lidar node data through the following command.
xxxxxxxxxxros2 topic echo