8. MoveIt trajectory planning
This lesson takes the MoveIT simulation as an example. If you need to set the synchronization between the real machine and the simulation, please refer to the lesson [02, MoveIt Precautions and Controlling the Real Machine]. ! ! ! be careful! ! !
The effect demonstration is a virtual machine, and other masters are running (related to the performance of the master, depending on the actual situation).
8.1. Start
Start the MoveIT
roslaunch transbot_se_moveit_config demo.launch Start trajectory planning node
xxxxxxxxxxrosrun transbot_se_moveit_config 06_multi_track_motion
Effect drawing
To view the track, you need to add the [MarkerArray] plugin and select the [/rviz_visual_tools] topic.
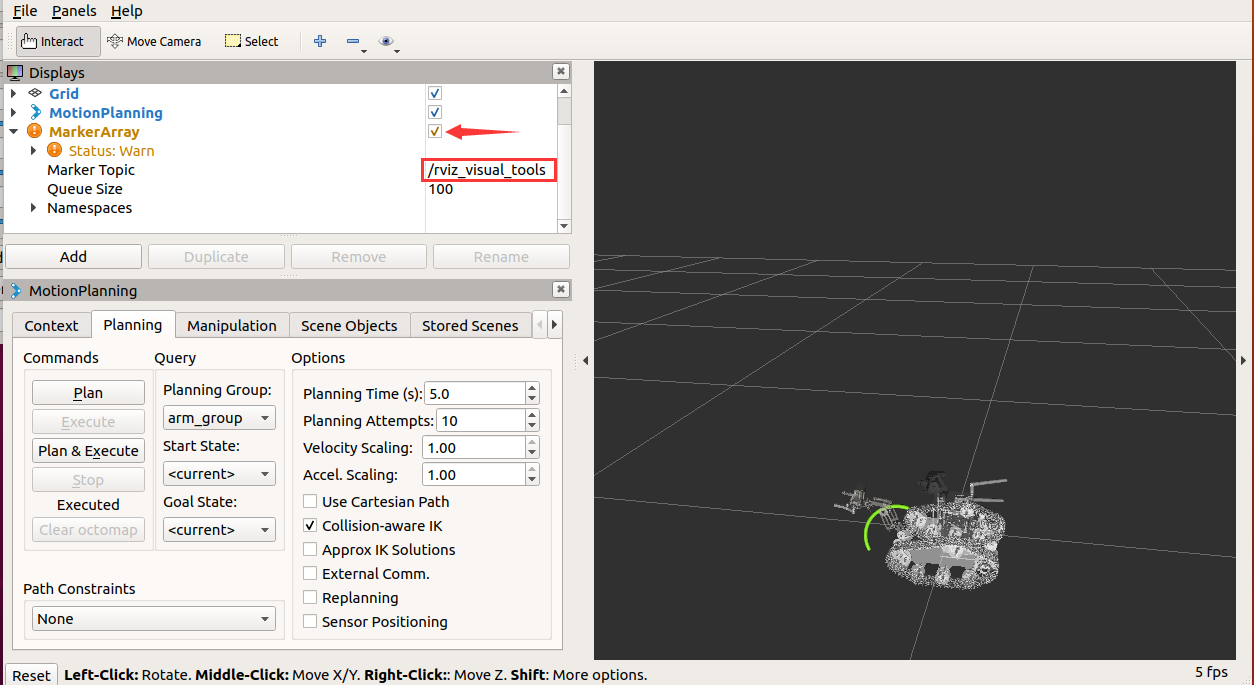
Given three reachable target points of the robotic arm, MoveIT will plan three feasible trajectories according to the target points, and then combine the three trajectories into a continuous trajectory.
8.2. Source code analysis
Set three reachable target points (any target point can be reached, it must be reachable)
xxxxxxxxxx vector<vector<double>> poses{ {0.15, 1.62}, {0,0}, {2.22, 3.26} }; for (int i = 0; i < poses.size(); ++i) { multi_trajectory(transbot, poses.at(i), trajectory); }Plan each trajectory
xxxxxxxxxxvoid multi_trajectory( moveit::planning_interface::MoveGroupInterface &transbot, const vector<double> &pose, moveit_msgs::RobotTrajectory &trajectory) { moveit::planning_interface::MoveGroupInterface::Plan plan; const robot_state::JointModelGroup *joint_model_group; //Get the robot's starting position moveit::core::RobotStatePtr start_state(transbot.getCurrentState()); joint_model_group = start_state->getJointModelGroup(transbot.getName()); transbot.setJointValueTarget(pose); transbot.plan(plan); start_state->setJointGroupPositions(joint_model_group, pose); transbot.setStartState(*start_state); trajectory.joint_trajectory.joint_names = plan.trajectory_.joint_trajectory.joint_names; for (size_t j = 0; j < plan.trajectory_.joint_trajectory.points.size(); j++) { trajectory.joint_trajectory.points.push_back(plan.trajectory_.joint_trajectory.points[j]); }}Trajectory merge
xxxxxxxxxx moveit::planning_interface::MoveGroupInterface::Plan joinedPlan; robot_trajectory::RobotTrajectory rt(transbot.getCurrentState()->getRobotModel(), "arm_group"); rt.setRobotTrajectoryMsg(*transbot.getCurrentState(), trajectory); trajectory_processing::IterativeParabolicTimeParameterization iptp; iptp.computeTimeStamps(rt, 1, 1); rt.getRobotTrajectoryMsg(trajectory); joinedPlan.trajectory_ = trajectory;Track display
xxxxxxxxxx//Show trace tool.publishTrajectoryLine(joinedPlan.trajectory_, transbot.getCurrentState()->getJointModelGroup("arm_group")); tool.trigger();Perform trajectory planning
xxxxxxxxxxif (!transbot.execute(joinedPlan)) { ROS_ERROR("Failed to execute plan"); return false; }