2.Assemble
1. Install Robotic arm
2.2 Install map

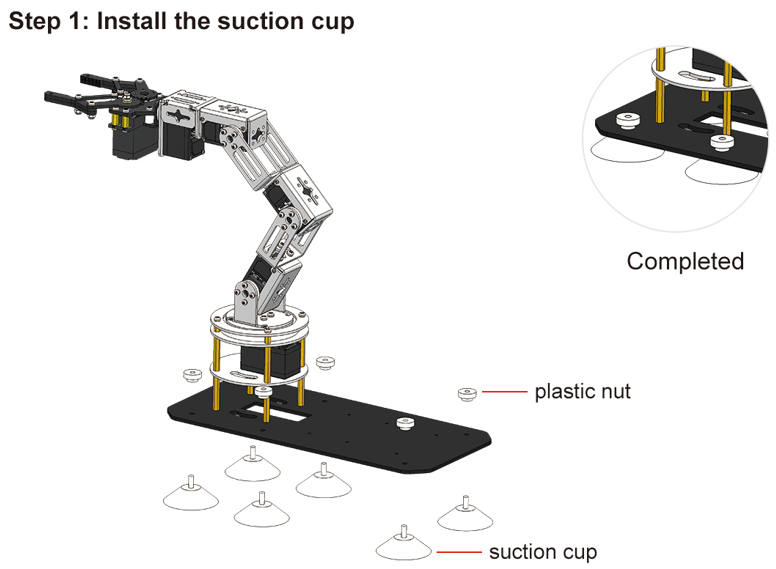
Remove the two suction cups at the front of the robotic arm, as shown in the figure below, place the map upward, pass the two suction cup screws through the map and fix it to the front of the robotic arm base. After the suction cup is installed, place the robotic arm on a smooth and clean table, press the chassis to attach the suction cup to the table.