8.Trajectory planning
1. Start up
Start MoveIT
roslaunch dofbot_config demo.launchStart trajectory planning node
xxxxxxxxxxrosrun dofbot_moveit 06_multi_track_motion
To view the trajectory, you need to add the [MarkerArray] plug-in and select the [/rviz_visual_tools] topic.
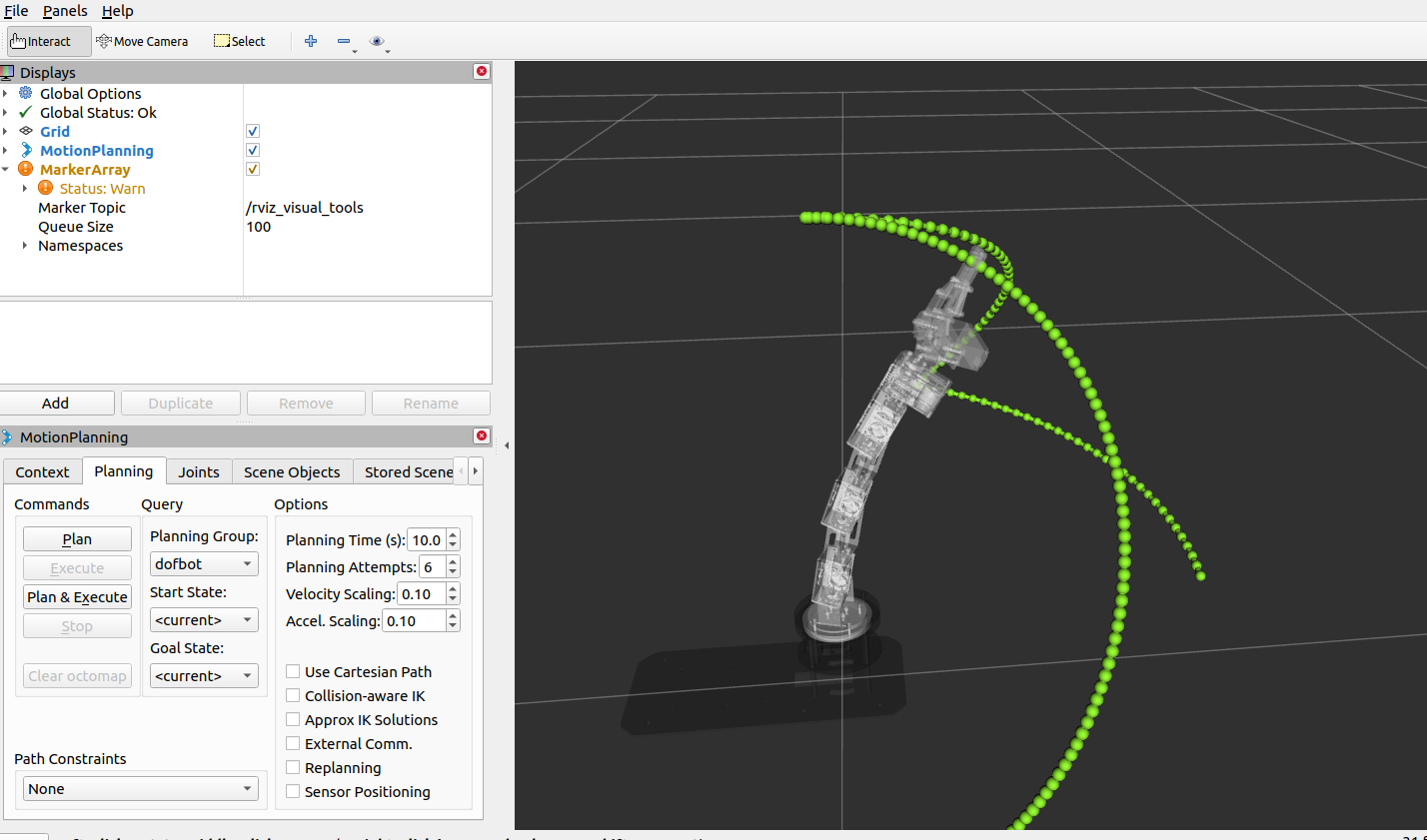
Given three reachable target points of the robotic arm, MoveIT will plan three feasible trajectories based on the target points, and then merge the three trajectories into one continuous trajectory.
2. Code
Set three reachable target points (you can have several target points, they must be reachable).
xxxxxxxxxx vector<vector<double>> poses{ {1.34, -1.0, -0.61, 0.2, 0}, {0, 0, 0, 0, 0}, {-1.16, -0.97, -0.81, -0.79, 3.14} }; for (int i = 0; i < poses.size(); ++i) { multi_trajectory(yahboomcar, poses.at(i), trajectory); }Plan each trajectory
x
void multi_trajectory( moveit::planning_interface::MoveGroupInterface &yahboomcar, const vector<double> &pose, moveit_msgs::RobotTrajectory &trajectory) { moveit::planning_interface::MoveGroupInterface::Plan plan; const robot_state::JointModelGroup *joint_model_group; // Get the starting position of the robot moveit::core::RobotStatePtr start_state(yahboomcar.getCurrentState()); joint_model_group = start_state->getJointModelGroup(yahboomcar.getName()); yahboomcar.setJointValueTarget(pose); yahboomcar.plan(plan); start_state->setJointGroupPositions(joint_model_group, pose); yahboomcar.setStartState(*start_state); trajectory.joint_trajectory.joint_names = plan.trajectory_.joint_trajectory.joint_names; for (size_t j = 0; j < plan.trajectory_.joint_trajectory.points.size(); j++) { trajectory.joint_trajectory.points.push_back(plan.trajectory_.joint_trajectory.points[j]); }}Trajectory merge
xxxxxxxxxx moveit::planning_interface::MoveGroupInterface::Plan joinedPlan; robot_trajectory::RobotTrajectory rt(yahboomcar.getCurrentState()->getRobotModel(), "arm_group"); rt.setRobotTrajectoryMsg(*yahboomcar.getCurrentState(), trajectory); trajectory_processing::IterativeParabolicTimeParameterization iptp; iptp.computeTimeStamps(rt, 1, 1); rt.getRobotTrajectoryMsg(trajectory); joinedPlan.trajectory_ = trajectory;Track display
x
moveit_visual_tools::MoveItVisualTools tool(yahboomcar.getPlanningFrame()); tool.deleteAllMarkers(); /* ... */ // Show track tool.publishTrajectoryLine(joinedPlan.trajectory_, yahboomcar.getCurrentState()->getJointModelGroup("arm_group")); tool.trigger();Execute trajectory planning
xxxxxxxxxx if (!yahboomcar.execute(joinedPlan)) { ROS_ERROR("Failed to execute plan"); return false; }