Brush
1. Introduction
MediaPipe is an open source data stream processing machine learning application development framework developed by Google. It is a graph-based data processing pipeline for building and using multiple forms of data sources, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (Raspberry Pi, etc.), mobile devices (iOS and Android), workstations and servers, and supports mobile GPU acceleration. MediaPipe provides cross-platform, customizable ML solutions for real-time and streaming media.
The core framework of MediaPipe is implemented in C++ and provides support for languages such as Java and Objective C. The main concepts of MediaPipe include Packet, Stream, Calculator, Graph and Subgraph.
Features of MediaPipe:
End-to-end acceleration: Built-in fast ML inference and processing accelerates even on commodity hardware.
Build once, deploy anywhere: Unified solution for Android, iOS, desktop/cloud, web and IoT.
Ready-to-use solutions: cutting-edge ML solutions that showcase the full capabilities of the framework.
Free and open source: frameworks and solutions under Apache2.0, fully extensible and customizable.
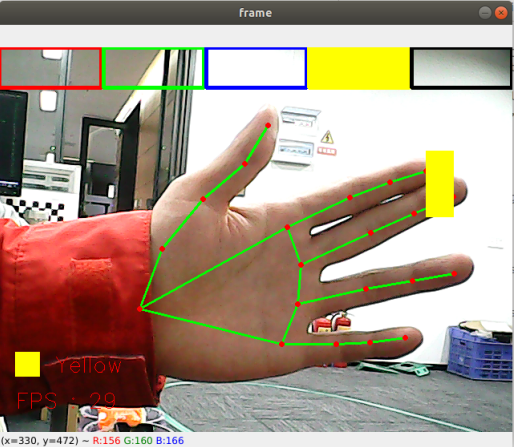
2. Brush
When the right middle finger and middle finger are combined, they are in the selection state, and a color selection box pops up at the same time. When the two fingertips move to the corresponding color position, the color is selected (black is the eraser);When the thumb and middle finger are separated, the drawing state begins and you can draw anywhere on the drawing board.
2.1 Start up
Start Docker
After entering the Raspberry Pi 5 desktop, open a terminal and run the following command to start the container corresponding to Dofbot:
xxxxxxxxxx./Docker_Ros.sh
Input command:
cd ~/yahboomcar_ws/src/yahboomcar_mediapipe/scriptspython3 09_VirtualPaint.py
2.2 Source code
Code path:~/yahboomcar_ws/src/yahboomcar_mediapipe/scripts
x#!/usr/bin/env python3# encoding: utf-8import mathimport timeimport cv2 as cvimport numpy as npimport mediapipe as mp
xp = yp = pTime = boxx = 0tipIds = [4, 8, 12, 16, 20]imgCanvas = np.zeros((480, 640, 3), np.uint8)brushThickness = 5eraserThickness = 100top_height = 50Color = "Red"ColorList = { 'Red': (0, 0, 255), 'Green': (0, 255, 0), 'Blue': (255, 0, 0), 'Yellow': (0, 255, 255), 'Black': (0, 0, 0),}
class handDetector: def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5): self.tipIds = [4, 8, 12, 16, 20] self.mpHand = mp.solutions.hands self.mpDraw = mp.solutions.drawing_utils self.hands = self.mpHand.Hands( static_image_mode=mode, max_num_hands=maxHands, min_detection_confidence=detectorCon, min_tracking_confidence=trackCon ) self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=15) self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=10, circle_radius=10)
def findHands(self, frame, draw=True): self.lmList = [] img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB) self.results = self.hands.process(img_RGB) if self.results.multi_hand_landmarks: for handLms in self.results.multi_hand_landmarks: if draw: self.mpDraw.draw_landmarks(frame, handLms, self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec) else: self.mpDraw.draw_landmarks(frame, handLms, self.mpHand.HAND_CONNECTIONS) for id, lm in enumerate(self.results.multi_hand_landmarks[0].landmark): h, w, c = frame.shape cx, cy = int(lm.x * w), int(lm.y * h) # print(id, cx, cy) self.lmList.append([id, cx, cy]) return frame, self.lmList
def fingersUp(self): fingers=[] # Thumb if (self.calc_angle(self.tipIds[0], self.tipIds[0] - 1, self.tipIds[0] - 2) > 150.0) and ( self.calc_angle( self.tipIds[0] - 1, self.tipIds[0] - 2, self.tipIds[0] - 3) > 150.0): fingers.append(1) else: fingers.append(0) # 4 finger for id in range(1, 5): if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]: fingers.append(1) else: fingers.append(0) return fingers
def get_dist(self, point1, point2): x1, y1 = point1 x2, y2 = point2 return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))
def calc_angle(self, pt1, pt2, pt3): point1 = self.lmList[pt1][1], self.lmList[pt1][2] point2 = self.lmList[pt2][1], self.lmList[pt2][2] point3 = self.lmList[pt3][1], self.lmList[pt3][2] a = self.get_dist(point1, point2) b = self.get_dist(point2, point3) c = self.get_dist(point1, point3) try: radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b)) angle = radian / math.pi * 180 except: angle = 0 return abs(angle)
if __name__ == '__main__': capture = cv.VideoCapture(0) capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G')) capture.set(cv.CAP_PROP_FRAME_WIDTH, 640) capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480) print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS)) hand_detector = handDetector(detectorCon=0.85) while capture.isOpened(): ret, frame = capture.read() # frame = cv.flip(frame, 1) h, w, c = frame.shape frame,lmList = hand_detector.findHands(frame, draw=False) if len(lmList) != 0: # print(lmList) # tip of index and middle fingers x1, y1 = lmList[8][1:] x2, y2 = lmList[12][1:] fingers = hand_detector.fingersUp() if fingers[1] and fingers[2]: # print("Seclection mode") if y1 < top_height: if 0 < x1 < int(w / 5) - 1: boxx = 0 Color = "Red" if int(w / 5) < x1 < int(w * 2 / 5) - 1: boxx = int(w / 5) Color = "Green" elif int(w * 2 / 5) < x1 < int(w * 3 / 5) - 1: boxx = int(w * 2 / 5) Color = "Blue" elif int(w * 3 / 5) < x1 < int(w * 4 / 5) - 1: boxx = int(w * 3 / 5) Color = "Yellow" elif int(w * 4 / 5) < x1 < w - 1: boxx = int(w * 4 / 5) Color = "Black" cv.rectangle(frame, (x1, y1 - 25), (x2, y2 + 25), ColorList[Color], cv.FILLED) cv.rectangle(frame, (boxx, 0), (boxx + int(w / 5), top_height), ColorList[Color], cv.FILLED) cv.rectangle(frame, (0, 0), (int(w / 5) - 1, top_height), ColorList['Red'], 3) cv.rectangle(frame, (int(w / 5) + 2, 0), (int(w * 2 / 5) - 1, top_height), ColorList['Green'], 3) cv.rectangle(frame, (int(w * 2 / 5) + 2, 0), (int(w * 3 / 5) - 1, top_height), ColorList['Blue'], 3) cv.rectangle(frame, (int(w * 3 / 5) + 2, 0), (int(w * 4 / 5) - 1, top_height), ColorList['Yellow'], 3) cv.rectangle(frame, (int(w * 4 / 5) + 2, 0), (w - 1, top_height), ColorList['Black'], 3) if fingers[1] and fingers[2] == False and math.hypot(x2 - x1, y2 - y1) > 50: # print("Drawing mode") if xp == yp == 0: xp, yp = x1, y1 if Color == 'Black': cv.line(frame, (xp, yp), (x1, y1), ColorList[Color], eraserThickness) cv.line(imgCanvas, (xp, yp), (x1, y1), ColorList[Color], eraserThickness) else: cv.line(frame, (xp, yp), (x1, y1), ColorList[Color], brushThickness) cv.line(imgCanvas, (xp, yp), (x1, y1), ColorList[Color], brushThickness) cv.circle(frame, (x1, y1), 15, ColorList[Color], cv.FILLED) xp, yp = x1, y1 else: xp = yp = 0 imgGray = cv.cvtColor(imgCanvas, cv.COLOR_BGR2GRAY) _, imgInv = cv.threshold(imgGray, 50, 255, cv.THRESH_BINARY_INV) imgInv = cv.cvtColor(imgInv, cv.COLOR_GRAY2BGR) frame = cv.bitwise_and(frame, imgInv) frame = cv.bitwise_or(frame, imgCanvas) if cv.waitKey(1) & 0xFF == ord('q'): break cTime = time.time() fps = 1 / (cTime - pTime) pTime = cTime text = "FPS : " + str(int(fps)) cv.rectangle(frame, (20, h - 100), (50, h - 70), ColorList[Color], cv.FILLED) cv.putText(frame, Color, (70, h - 75), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) cv.putText(frame, text, (20, h-30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) cv.imshow('frame', frame) capture.release() cv.destroyAllWindows()