MoveIt Cartesian Path
Preface
We have built MoveIt environments on both Jetson_Nano and Orin series motherboards. Due to the onboard performance of Jetson_Nano, running the MoveIt program on the motherboard will be slow and slow to load. It takes about 3 minutes to complete the loading. Therefore, we recommend that users of Jetson motherboards run the MoveIt program on the configured virtual machine we provide. Orin motherboards can run MoveIt smoothly on the motherboard without running it on a virtual machine. Whether running on a virtual machine or on the motherboard, the startup instructions are the same. The following tutorials will take running on the Orin motherboard as an example.
1. Introduction
Cartesian coordinate system is a general term for rectangular coordinate system and oblique coordinate system. Cartesian path is actually the line connecting any two points in space
2. Functional Description
After the program runs, the robot arm will move according to the posture set by the program, and the running path will be displayed in rviz.
3. Start
First, start MoveIt. Enter the following command in the terminal to start it.
xxxxxxxxxxroslaunch dofbot_pro_config demo.launch
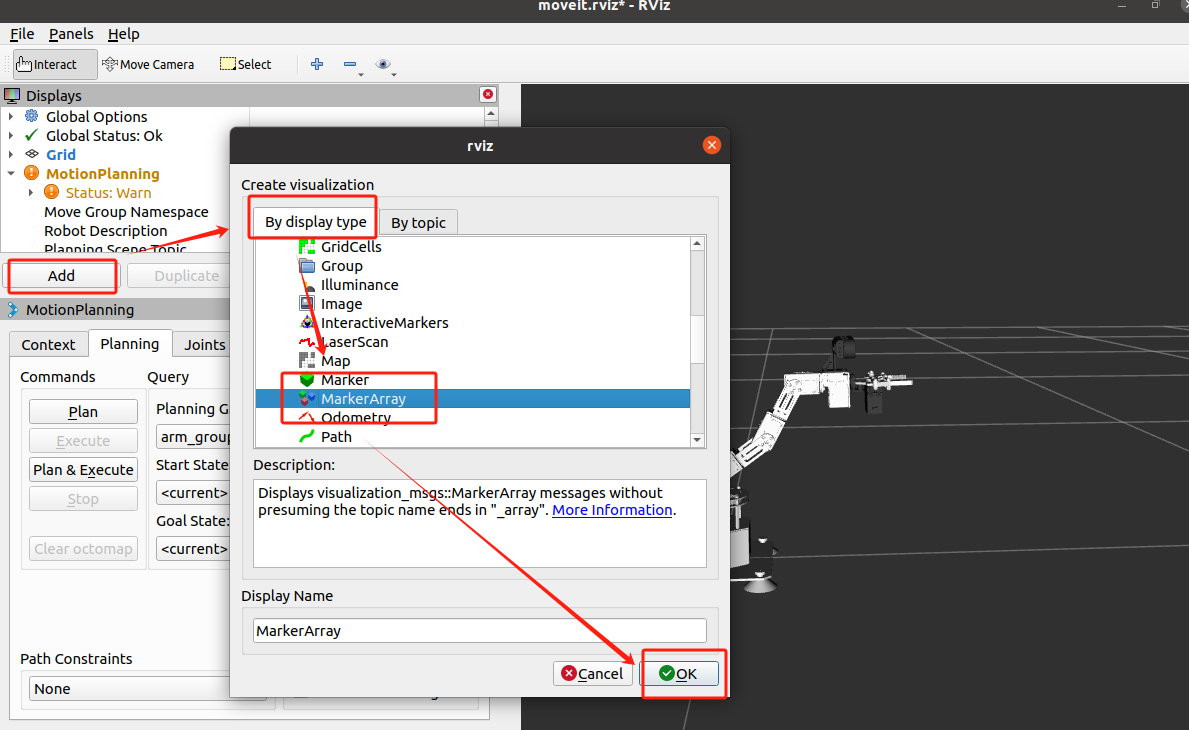
After MoveIt is successfully started, set up rviz and add the [MarkerArray] plug-in, as shown in the figure below.
Enter /rviz_visual_tools in [Marker Topic]. The setting is now complete. Press [Ctrl s] to save the rviz file.
Start Cartesian path node
xxxxxxxxxxrosrun arm_moveit_demo 04_cartesian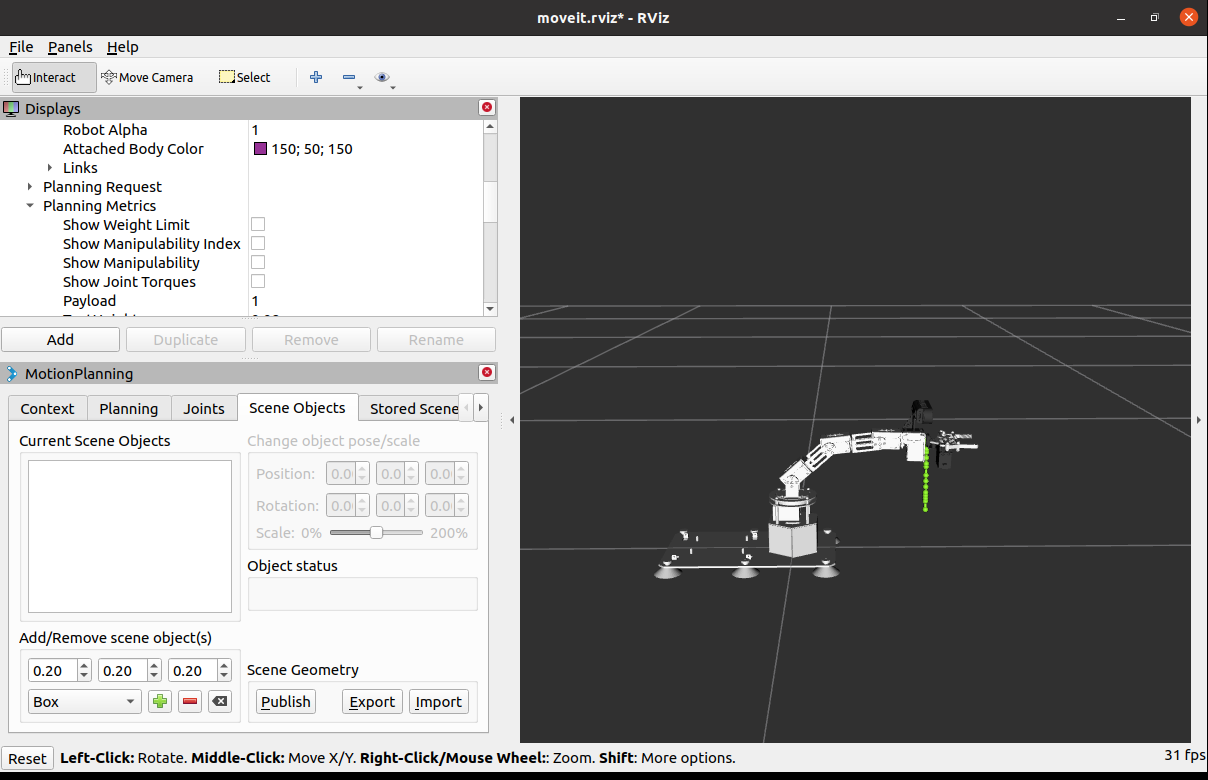
4. Core code analysis
Code path:/home/jetson/dofbot_pro_ws/src/arm_moveit_demo/src/rosrun arm_moveit_demo 04_cartesian.cpp
xxxxxxxxxxusing namespace std;int main(int argc, char **argv) { ros::init(argc, argv, "cartesian_plan_cpp"); ros::NodeHandle n; ros::AsyncSpinner spinner(1); spinner.start(); moveit::planning_interface::MoveGroupInterface dofbot("arm_group"); string frame = dofbot.getPlanningFrame(); moveit_visual_tools::MoveItVisualTools tool(frame); tool.deleteAllMarkers(); dofbot.allowReplanning(true); // Planning time (unit: seconds) dofbot.setPlanningTime(50); dofbot.setNumPlanningAttempts(10); // Set the allowable target angle error dofbot.setGoalJointTolerance(0.001); dofbot.setGoalPositionTolerance(0.001);//0.01 dofbot.setGoalOrientationTolerance(0.001); dofbot.setGoalTolerance(0.001); // Set the maximum allowed speed and acceleration dofbot.setMaxVelocityScalingFactor(1.0); dofbot.setMaxAccelerationScalingFactor(1.0); ROS_INFO("Set Init Pose."); // Set the specific location dofbot.setNamedTarget("up"); dofbot.move(); sleep(0.5); vector<double> pose{0, -1.57, -0.74, 0.71, 0}; dofbot.setJointValueTarget(pose); sleep(0.5); moveit::planning_interface::MoveGroupInterface::Plan plan; dofbot.plan(plan); dofbot.execute(plan); // Get the current end position of the robot arm geometry_msgs::Pose start_pose = dofbot.getCurrentPose(dofbot.getEndEffectorLink()).pose; std::vector<geometry_msgs::Pose> waypoints; // Add the initial pose to the waypoint list waypoints.push_back(start_pose); start_pose.position.z += 0.02; waypoints.push_back(start_pose); start_pose.position.z += 0.02; waypoints.push_back(start_pose); start_pose.position.z += 0.02; waypoints.push_back(start_pose); start_pose.position.z += 0.02; waypoints.push_back(start_pose); start_pose.position.z += 0.02; waypoints.push_back(start_pose); start_pose.position.z += 0.02; waypoints.push_back(start_pose); start_pose.position.y -= 0.02; waypoints.push_back(start_pose); start_pose.position.y -= 0.02; waypoints.push_back(start_pose); start_pose.position.y -= 0.02; // Path planning in Cartesian space moveit_msgs::RobotTrajectory trajectory; const double jump_threshold = 0.0; const double eef_step = 0.1;//0.1 double fraction = 0.0; int maxtries = 100; // Maximum number of attempts to plan int attempts = 0; // Number of attempts to plan sleep(5.0); while (fraction < 1.0 && attempts < maxtries) { fraction = dofbot.computeCartesianPath(waypoints, eef_step, jump_threshold, trajectory); //ROS_INFO("fraction: %f", fraction); attempts++; //if (attempts % 10 == 0) ROS_INFO("Still trying after %d attempts...", attempts); } ROS_INFO("fraction: %f", fraction); if (fraction > 0.5) { ROS_INFO("Path computed successfully. Moving the arm."); // Generate motion planning data for the robotic arm moveit::planning_interface::MoveGroupInterface::Plan plan; plan.trajectory_ = trajectory; // Display the track tool.publishTrajectoryLine(plan.trajectory_, dofbot.getCurrentState()->getJointModelGroup("arm_group")); tool.trigger(); // Execute the movement dofbot.execute(plan); sleep(1); } else { ROS_INFO("Path planning failed with only %0.6f success after %d attempts.", fraction, maxtries); } return 0;}