Finger recognition
1. Purpose of the experiment
Finger recognition to drive the robot dog
2. Experimental path source code
Enter the robot dog system, end the robot dog program, enter "ip (ip is the robot dog's ip): 8888" in the browser, enter the password "yahboom" and log in. Enter the path of DOGZILLA_Lite_class/5.AI Visual Recognition Course/14. Finger recognition and run FingerCtrl_USB.ipynb .
Or enter the command in the terminal to directly start the Python script
xxxxxxxxxxcd /home/pi/DOGZILLA_Lite_class/5.AI Visual Recognition Course/14. Finger recognitionpython3 FingerCtrl_USB.py
3. Experimental Phenomenon
After running the source code, you can see that the robot dog can detect your fingers and display them.
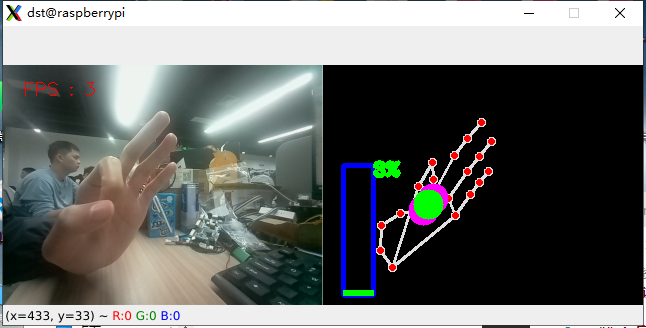
Note: The computer screen displays the original picture and the recognition result, while the robot dog can only display the recognition result because the screen is too small.
4. Main source code analysis
xxxxxxxxxxif __name__ == '__main__': capture = cv.VideoCapture(0) capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G')) capture.set(cv.CAP_PROP_FRAME_WIDTH, 320) capture.set(cv.CAP_PROP_FRAME_HEIGHT, 240) print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS)) hand_detector = handDetector() while capture.isOpened(): ret, frame = capture.read() action = cv.waitKey(1) & 0xFF # frame = cv.flip(frame, 1) img = hand_detector.findHands(frame) lmList = hand_detector.findPosition(frame, draw=False) if len(lmList) != 0: angle = hand_detector.calc_angle(4, 0, 8) x1, y1 = lmList[4][1], lmList[4][2] x2, y2 = lmList[8][1], lmList[8][2] cx, cy = (x1 + x2) // 2, (y1 + y2) // 2 cv.circle(img, (x1, y1), 15, (255, 0, 255), cv.FILLED) cv.circle(img, (x2, y2), 15, (255, 0, 255), cv.FILLED) cv.line(img, (x1, y1), (x2, y2), (255, 0, 255), 3) cv.circle(img, (cx, cy), 15, (255, 0, 255), cv.FILLED) if angle <= 10: cv.circle(img, (cx, cy), 15, (0, 255, 0), cv.FILLED) volBar = np.interp(angle, [0, 70], [230, 100]) volPer = np.interp(angle, [0, 70], [0, 100]) value = np.interp(angle, [0, 70], [0, 255]) # print("angle: {},value: {}".format(angle, value)) # 进行阈值二值化操作,大于阈值value的,使用255表示,小于阈值value的,使用0表示 Perform a threshold binarization operation. Values ••greater than the threshold value are represented by 255, and values less than the threshold value are represented by 0. if effect[index]=="thresh": gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY) frame = cv.threshold(gray, value, 255, cv.THRESH_BINARY)[1] # 进行高斯滤波,(21, 21)表示高斯矩阵的长与宽都是21,标准差取value Perform Gaussian filtering, (21, 21) means the length and width of the Gaussian matrix are both 21, and the standard deviation is value elif effect[index]=="blur": frame = cv.GaussianBlur(frame, (21, 21), np.interp(value, [0, 255], [0, 11])) # 色彩空间的转化,HSV转换为BGR Color space conversion, HSV to BGR elif effect[index]=="hue": frame = cv.cvtColor(frame, cv.COLOR_BGR2HSV) frame[:, :, 0] += int(value) frame = cv.cvtColor(frame, cv.COLOR_HSV2BGR) # 调节对比度 Adjust contrast elif effect[index]=="enhance": enh_val = value / 40 clahe = cv.createCLAHE(clipLimit=enh_val, tileGridSize=(8, 8)) lab = cv.cvtColor(frame, cv.COLOR_BGR2LAB) lab[:, :, 0] = clahe.apply(lab[:, :, 0]) frame = cv.cvtColor(lab, cv.COLOR_LAB2BGR) if action == ord('q'): break if action == ord('f'): index += 1 if index >= len(effect): index = 0 cTime = time.time() fps = 1 / (cTime - pTime) pTime = cTime text = "FPS : " + str(int(fps)) cv.rectangle(img, (20, 100), (50, 230), (255, 0, 0), 3) cv.rectangle(img, (20, int(volBar)), (50, 230), (0, 255, 0), cv.FILLED) cv.putText(img, f'{int(volPer)}%', (50, 110), cv.FONT_HERSHEY_COMPLEX, 0.6, (0, 255, 0), 3) cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1) dst = hand_detector.frame_combine(frame, img) cv.imshow('dst', dst) #把画面显示在lcd屏上 Display the image on the LCD screen #b, g, r = cv.split(img) #屏幕显示原生图片 Screen displays the original image b, g, r = cv.split(img) #屏幕显示识别结果 Screen displays the recognition results image = cv.merge((r, g, b)) imgok = Image.fromarray(image) display.ShowImage(imgok) capture.release() cv.destroyAllWindows()The robot dog calls the detected finger model and displays the recognized finger gestures on the robot dog's screen and the computer's screen.