Mediapipe gesture recognition
1. Content Description
This lesson explains how to subscribe to an image topic to retrieve images and use MediaPipe for gesture recognition.
This section requires entering commands in the terminal. The terminal you open depends on your motherboard type. This lesson uses the Raspberry Pi 5 as an example. For Raspberry Pi and Jetson-Nano boards, you need to open a terminal on the host computer and enter the command to enter the Docker container. Once inside the Docker container, enter the commands mentioned in this section in the terminal. For instructions on entering the Docker container from the host computer, refer to this product tutorial [Configuration and Operation Guide]--[Enter the Docker (Jetson Nano and Raspberry Pi 5 users, see here)].
About Mediapipe:
MediaPipe is a data stream processing and machine learning application development framework developed and open-sourced by Google. It is a graph-based data processing pipeline used to build applications that utilize a variety of data sources, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (such as the Raspberry Pi), mobile devices (iOS and Android), workstations, and servers, and supports mobile GPU acceleration. MediaPipe provides a cross-platform, customizable ML solution for real-time and streaming media. The core framework of MediaPipe is implemented in C++, with support for languages such as Java and Objective C. Key concepts in MediaPipe include packets, streams, calculators, graphs, and subgraphs.
Mediapipe Hands
MediaPipe Hands is a high-fidelity hand and finger tracking solution. It uses machine learning (ML) to infer 21
After palm detection in the entire image, the 21 3D hand joint coordinates in the detected hand region are accurately located by regression based on the hand landmark model, i.e. direct coordinate prediction. The model learns a consistent internal hand pose representation, even for partially visible hands and
It is also robust to occlusion. To obtain ground truth data, we manually annotated approximately 30K real-world images with 21 3D coordinates, as shown below. To better cover possible hand poses and provide additional supervision on the properties of hand geometry, we also rendered high-quality synthetic hand models against various backgrounds and mapped them to corresponding 3D coordinates.
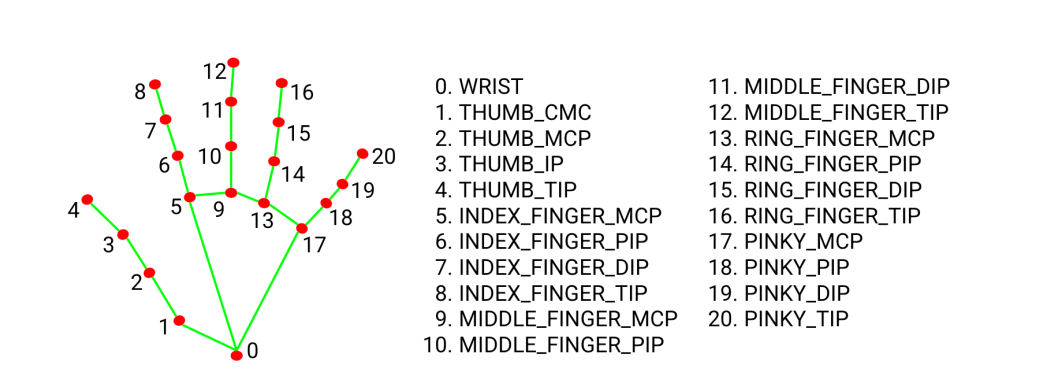
Therefore, as long as we can obtain the coordinate value of each joint, we can perform gesture recognition through calculation.
2. Program startup
First, in the terminal, enter the following command to start the camera,
xxxxxxxxxxros2 launch orbbec_camera dabai_dcw2.launch.py
After successfully starting the camera, open another terminal and enter the following command in the terminal to start the mediapipe gesture recognition program.
xxxxxxxxxxros2 run M3Pro_demo mediapipe_gesture
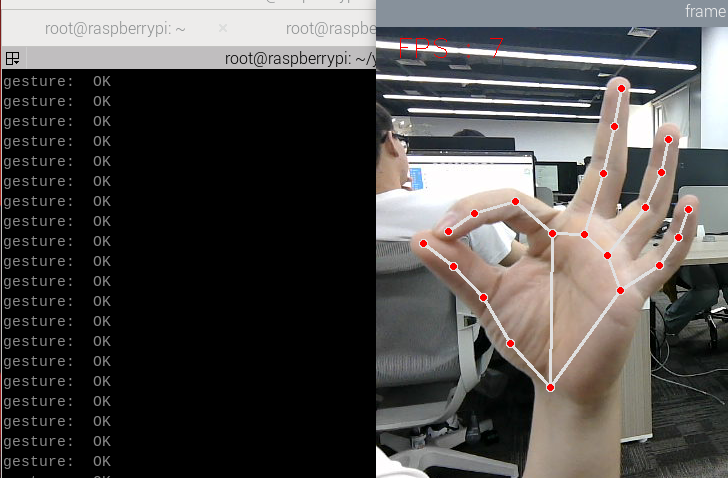
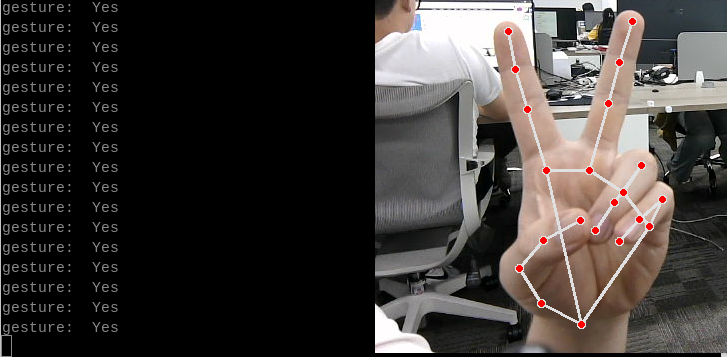
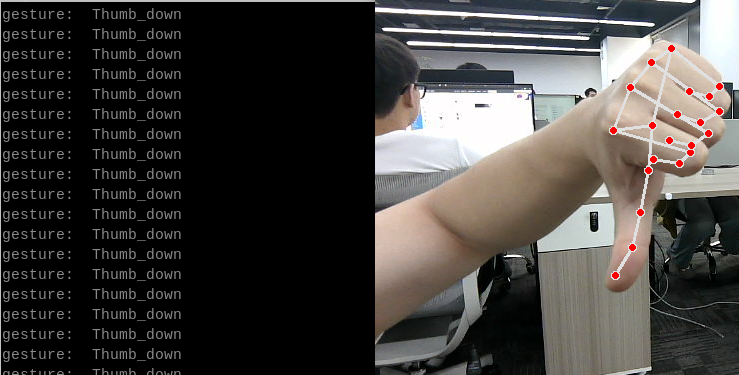
After the program is started, as shown in the figure below, it can recognize three gestures: [OK], [Yes] and [Thumb_down].
3. Core code analysis
Program code path:
Raspberry Pi 5 and Jetson-Nano board
The path in docker is
/root/yahboomcar_ws/src/M3Pro_demo/M3Pro_demo/mediapipe_gesture.pyOrin Motherboard
The program code path is
/home/jetson/yahboomcar_ws/src/M3Pro_demo/M3Pro_demo/mediapipe_gesture.py
Import the necessary library files,
xxxxxxxxxximport cv2import osfrom sensor_msgs.msg import Imageimport message_filtersfrom cv_bridge import CvBridgeimport cv2 as cvfrom arm_msgs.msg import ArmJointsimport timefrom M3Pro_demo.media_library import *from rclpy.node import Nodeimport rclpyfrom message_filters import Subscriber, TimeSynchronizer,ApproximateTimeSynchronizerfrom sensor_msgs.msg import Imageimport threadingInitialize some variables and create subscribers and publishers,
x
def __init__(self, name): super().__init__(name) self.init_joints = [90, 150, 12, 20, 90, 0] self.rgb_bridge = CvBridge() #Create an object recognized by Medipipe self.hand_detector = HandDetector() self.pr_time = time.time() self.pTime = self.cTime = 0 #Subscribe to the publisher, publish the initial position of the robotic arm, and control the movement of the robotic arm to the posture of the recognized gesture self.TargetAngle_pub = self.create_publisher(ArmJoints, "arm6_joints", 10) #Create a color image topic subscriber self.rgb_image_sub = Subscriber(self, Image, '/camera/color/image_raw') #Publish initial recognition posture self.pubSix_Arm(self.init_joints) self.ts = ApproximateTimeSynchronizer([self.rgb_image_sub], 1, 0.5) self.ts.registerCallback(self.callback) time.sleep(2) self.start_time = 0.0Color image callback function and image processing,
def callback(self,color_msg): rgb_image = self.rgb_bridge.imgmsg_to_cv2(color_msg, "bgr8") self.process(rgb_image) def process(self, frame): #Call the function to find the palm in the Medipipe recognition class frame, lmList, bbox = self.hand_detector.findHands(frame) #Judge the length of lmList. If it is greater than 0, it means the palm is found. if len(lmList) != 0: # Enter the thread to process the gesture recognition function, the parameter passed in is lmList gesture = threading.Thread(target=self.Gesture_Detect_threading, args=(lmList,bbox)) gesture.start() gesture.join() self.cTime = time.time() fps = 1 / (self.cTime - self.pTime) self.pTime = self.cTime text = "FPS : " + str(int(fps)) cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) if cv.waitKey(1) & 0xFF == ord('q'): cv.destroyAllWindows() cv.imshow('frame', frame)def Gesture_Detect_threading(self, lmList,bbox): #Call the function to get gesture in Medipipe recognition class gesture = self.hand_detector.get_gesture(lmList) print("gesture: ",gesture)The definition of the Medipipe recognition class can be found in the media_library library, which is located in the directory of the M3Pro_demo function package.
Raspberry Pi 5 and Jetson-Nano board
The path in docker is
/root/yahboomcar_ws/src/M3Pro_demo/M3Pro_demo/media_library.pyOrin Motherboard
The program code path is
/home/jetson/yahboomcar_ws/src/M3Pro_demo/M3Pro_demo/media_library.py
In this library, we use the native library of meidiapipe to expand and define many classes. Each class defines different functions. When we need them, we can pass the parameters into them. For example, we define the following function in the HandDetector class.
- findHands: Find hands
- fingersUp: fingers extended straight down
- ThumbTOforefinger: Detects the angle between the thumb and index finger
- get_gesture: Detect gestures