Isaac ROS 3D scene reconstruction and mapping
Isaac ROS 3D scene reconstruction and mapping official website link:https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_nvblox/index.html
Overview
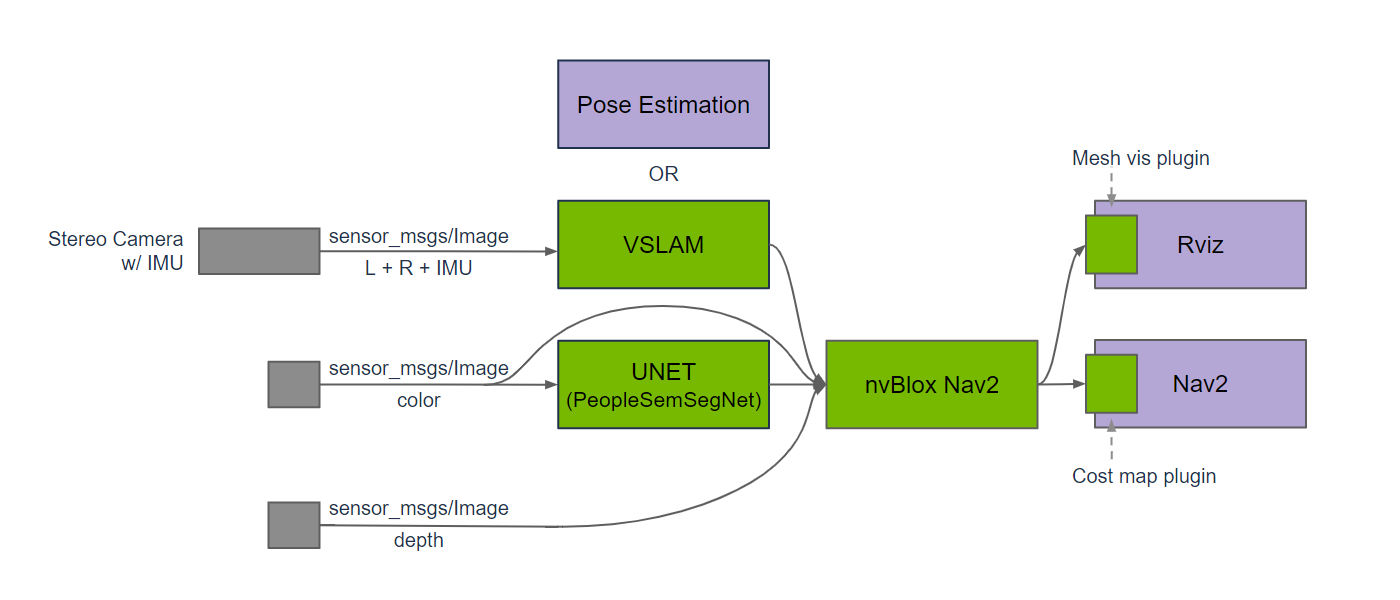
Isaac ROS Nvblox contains ROS 2 packages for 3D reconstruction and cost maps for navigation. isaac_ros_nvblox processes depth and pose to reconstruct a 3D scene in real-time and outputs a 2D costmap for Nav2. The costmap is used in planning during navigation as a vision-based solution to avoid obstacles.
isaac_ros_nvblox is designed to work with depth-cameras and/or 3D LiDAR. The package uses GPU acceleration to compute a 3D reconstruction and 2D costmaps using nvblox, the underlying framework-independent C++ library.
Quick Experience
To simplify development, we primarily use the Isaac ROS Dev Docker image and demonstrate the effects there. This demonstration does not require any camera device installation; it simulates the data stream from a camera by playing a rosbag file.
Note: If you wish to install on your own device or connect a camera to develop other features, please refer to the Isaac ROS official website and connect to an NVIDIA-specified camera model for your own development.
Open a terminal and enter the working directory.
xxxxxxxxxxcd ${ISAAC_ROS_WS}/src
Enter the Isaac ROS Dev Docker container.
xxxxxxxxxxcd ${ISAAC_ROS_WS}/src/isaac_ros_common && \./scripts/run_dev.sh
Run the following startup command.
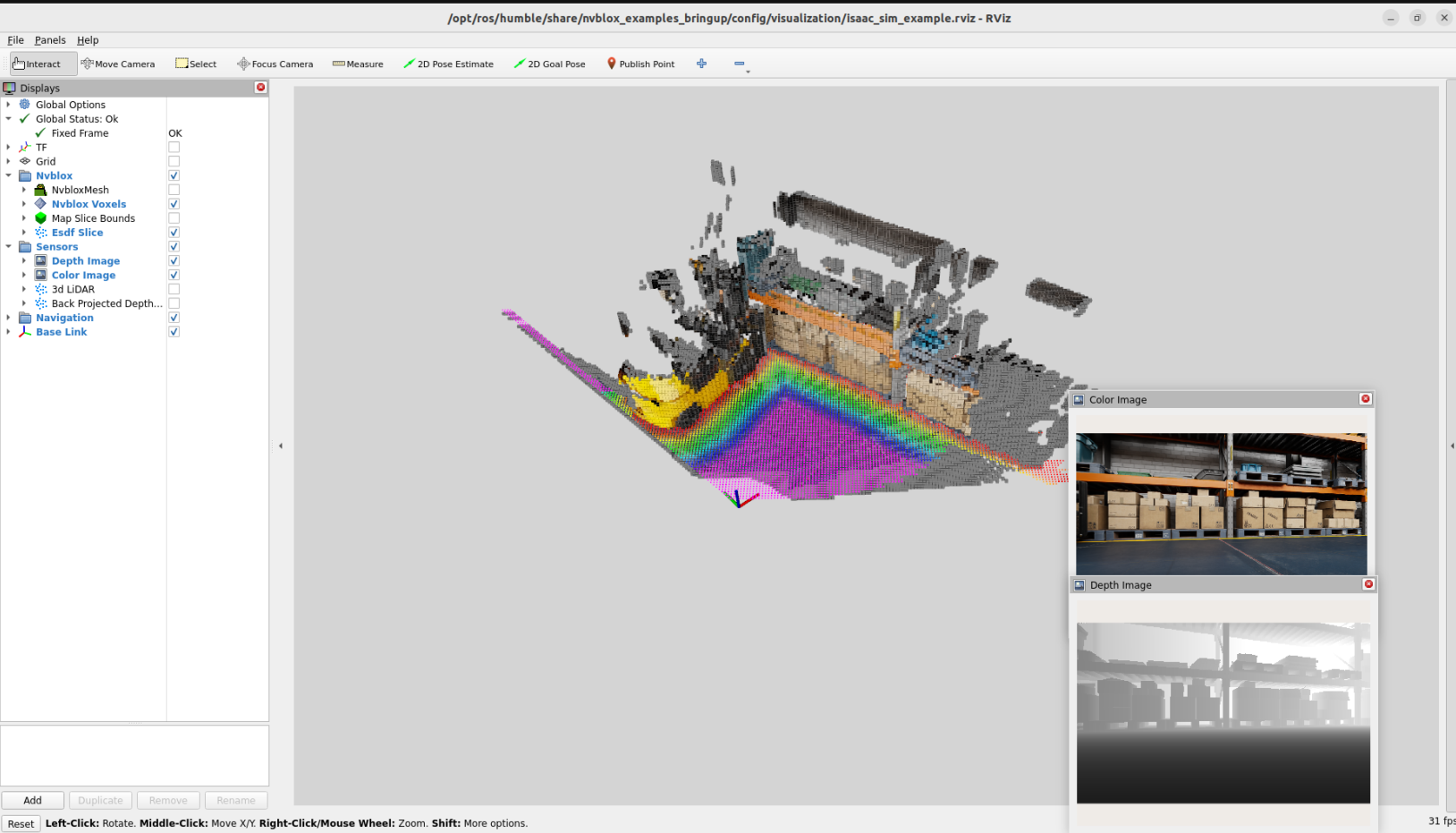
xxxxxxxxxxros2 launch nvblox_examples_bringup isaac_sim_example.launch.py ••\rosbag:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_nvblox/quickstart \navigation:=False
Run Results