Home
Learn
Solution
Software
∨
Controlling software
Programming software
About us
Store
micro:bit expansion board
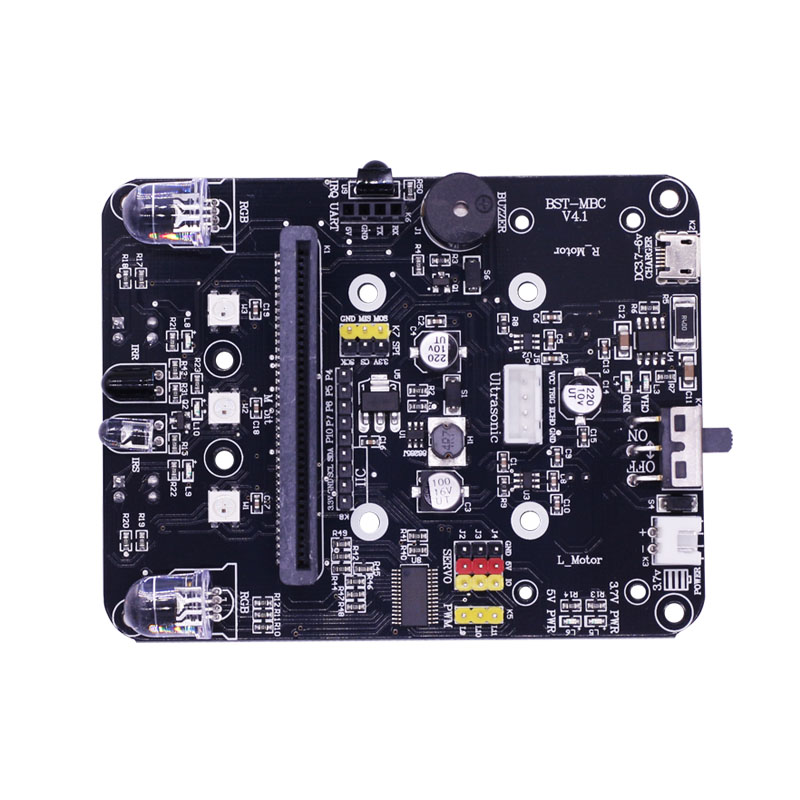
0.Introduction of extension board
Introduction of extension board
1.Basic lesson
1.1 Lesson 1 Heart beat
1.2 Lesson 2 “See who is pressing fast”
1.3 Lesson 3 “Flowing sand”
1.4 Lesson 4 “DIY thermometer ”
1.5 Lesson 5 “Direction follower”
1.6 Lesson 6 “Listen to music”
1.7 Lesson 7 “Dice game”
1.8 Lesson 8 “Good morning, good night”
2.Advanced lesson
2.1 Lesson 1 Buzzer singing
2.2 Lesson 2 “Craftsman music”
2.3 Lesson 3 “Colorful searchlight”
2.4 Lesson 4 “Colorful car light”
2.5 Lesson 5 “Full light control”
2.6 Lesson 6 “Light alone”
2.7 Lesson 7 “Horse race lamp”
2.8 Lesson 8 “Breathing lamp”
2.9 Lesson 9 “Ultrasonic sensor”
2.10 Lesson 10 “Servo control”
2.11 Lesson 11 “Infrared control”
Download
SCH
Download ZIP
Welcome to micro:bit expansion board repository
Loading...